
تعریف ربات همکار (کوبات) و معرفی ویژگی های بارز آن
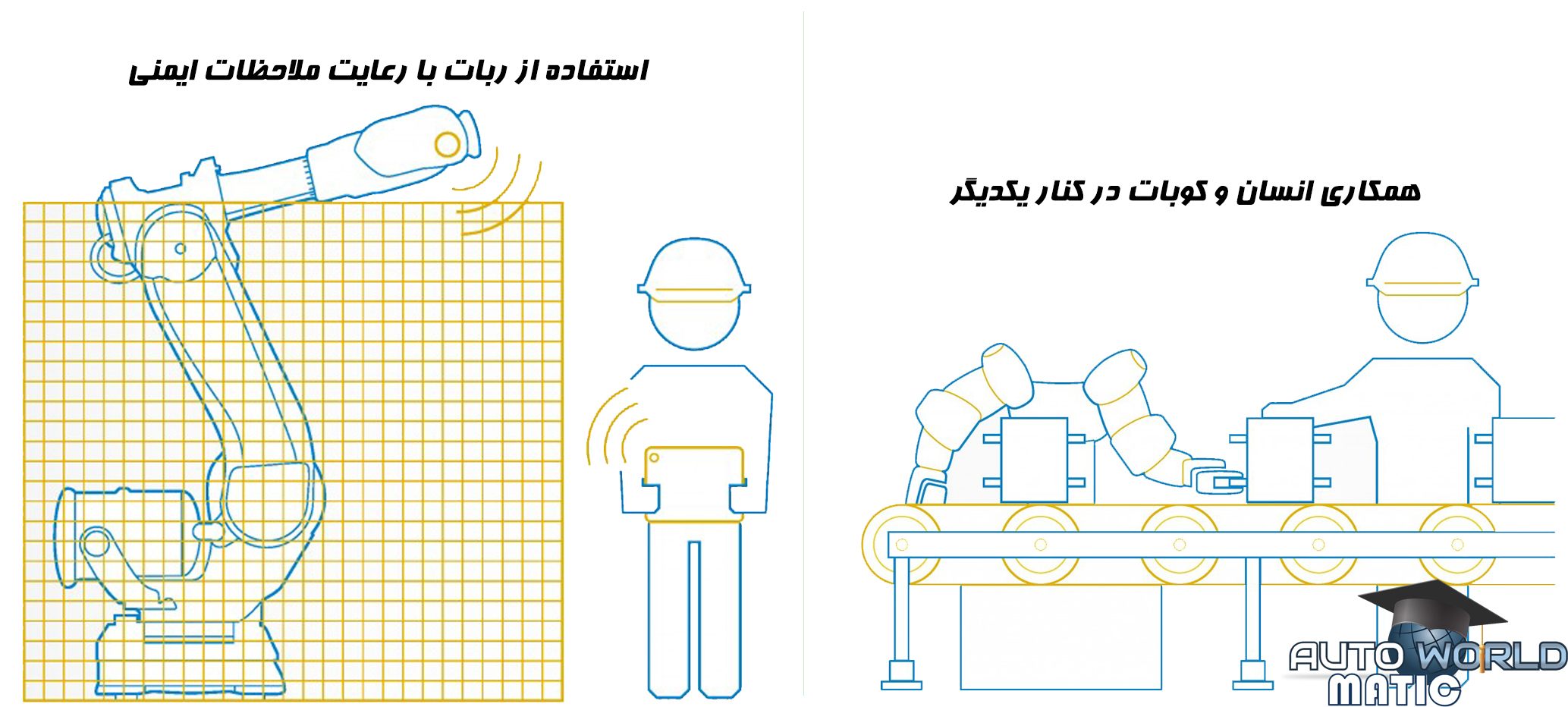
لغت «Collaborative» در زبان انگلیسی معادل واژه های «مشارکت و همکاری» در زبان فارسی می باشد و به معنای کارکردن دو یا چند نفر بصورت هماهنگ با یکدیگر به منظور تولید یا ایجاد چیزی و یا انجام کاری است. در دنیای رباتیک نیز منظور از ربات های همکار (به انگلیسی : Collaborative Robots)، ربات ها یا ماشین آلات پیشرفته ای هستند که شانه به شانه انسانها در یک فرآیند کاری مشترک در کنار آنها کار میکنند و بدون آنکه ایمنی انسانها را تهدید نمایند، سبب امدادرسانی و سادگی کار اپراتورهای انسانی می گردند. این ربات های همکار که کو-ربات یا کوبات (به انگلیسی : Co-Robots Or Cobots) نیز نامیده می شوند، اولین بار در سال ۱۹۹۶ میلادی توسط Edward Colgate و Michael Peshkin، از پروفسورهای دانشگاه Northwestern امریکا ابداع گردیدند. اداره ثبت اختراعات امریکا، کوبات را بازوی مکانیکی چند منظوره ای می خواند که در تعامل فیزیکی مستقیم با انسانها قرار داشته و توسط کامپیوتر کنترل می شود. در شکل زیر وضعیت کارکرد انسانها با رباتها و کوباتها نشان داده شده است.
در خصوص تعریف کوبات ها و شیوه مشارکت و همکاری آنها با انسانها سوء برداشت هایی وجود دارد، برخی ربات همکار را رباتی می نامند که تنها بدون نیاز به فنس های ایمنی بتواند در کنار انسانها کار نماید، اما این تعریف دارای اشکالاتی است. در استاندارد ISO10218 بخش اول و دوم، چهار ویژگی زیر برای شناسایی ربات های همکار برشمرده شده است:
– توقف ناشی از سیستم مانیتورینگ ایمنی (Safety Monitored Stop)
این ویژگی بدان معناست که اگر فردی به محدوده کاری یک ربات در حال فعالیت وارد شود، ربات بلافاصله فعالیت خود را متوقف می نماید. برای مثال، کاربردی را در نظر بگیرید که در آن، ربات یک جسم سنگین را برداشته و اپراتور می بایست عملیات خاصی را روی آن جسم انجام دهد. در این حالت اپراتور در محدوده کاری مجاز ربات قرارگرفته و مشغول انجام فعالیت خود می گردد. حال اگر اپراتور در شرایطی قرار گیرد که برای ربات به عنوان محدوده منع شده، تعریف شده است، ربات فوراً متوقف و ترمز محورهای آن درگیر می شود. این قبیل کاربردها زمانی مناسب است که احتمال ورود اپراتور به محدوده منع شده یا مدت زمان ورود به این محدوده اندک باشد. در این حالت اپراتور قسمت عمده وقت خود را جدا از ربات کار می کند و تنها بخش کوچکی از زمانش ممکن است در محدوده منع شده ربات سپری شود. بدیهی است که در غیر اینصورت بخش قابل توجهی از زمان ربات صرف توقف های متوالی ناشی از ورود انسان به محدوده کاری خطرناک خواهد شد و این امر، سیکل کاری آن فعالیت ها را غیرمنطقی خواهد نمود.
– سیستم هدایت دستی (Hand Guiding)
منظور از این ویژگی، امکان هدایت (تیچ مسیر) ربات به کمک دست می باشد. برای مثال، فرض کنید رباتی به منظور برداشتن یک قطعه از یک نقطه و قرار دادن آن در مکان دیگری مورد استفاده قرار گرفته است، ویژگی هدایت دستی بدان معناست که اپراتور با گرفتن بازوی ربات و حرکت دادن آن در مسیر موردنظر، قادر به تیچ ربات باشد. اما باید توجه شود که این شیوه هدایت، زمانیکه ربات در مد تیچ کردن قرار دارد استفاده می شود و در سایر مدهای کاری این قابلیت فعال می نمی باشد.
– سیستم مانیتورینگ سرعت و محدوده جدایی (Speed and Separation Monitoring)
این ویژگی به معنای استفاده از سیستم های بینایی ماشین (به انگلیسی : Vision) و توابع ایمنی از پیش تعریف شده به منظور مشخص نمودن محدوده کاری ایمن برای اپراتوران خطوط تولید و جداسازی محدوده های مشترک مابین ربات و انسان می باشد. بنابر این ویژگی، ربات به کمک توابع ایمنی از پیش تعریف شده، زمانیکه اپراتور به موقعیت مشخصی وارد می شود، با کاهش سرعتِ حرکت محورها و در صورت نزدیک شدن بیش از حد با توقف خود به این وضعیت واکنش نشان میدهد. تفاوت این ویژگی با ویژگی نخست در آن است که در این روش، ربات بسته به میزان فاصله اپراتور از محدوده خطر، واکنشهای متفاوتی نشان میدهد و تنها زمانی متوقف می شود که انسان بسیار به او نزدیک شده باشد.
– محدود نمودن نیرو و توان (Power and Force Limiting)
بنابر این ویژگی، اپراتور میتواند بصورت شانه به شانه در کنار ربات، کار خود را انجام دهد، بدون آنکه ربات به هیچگونه تجهیز ایمنی اضافی مجهز شده باشد. طبق این ویژگی، ربات قادر است نیروهای غیرعادی در مسیر حرکتش را احساس نماید و زمانیکه اضافه باری را بصورت نیرو بر محورهایش احساس نماید، متوقف شود و یا حتی به عقب برگردد. این امر بدان معناست که آنها قادر خواهند بود به سرعت نسبت به تماس یا برخورد به انسانها واکنش نشان دهند. ضمناً رباتها برای نیل به این هدف، می بایست بگونه ای طراحی شوند که فاقد لبه های تیز و بُرندِه بوده و بتوانند نیروهای اضافی را که بر روی یک سطح وسیع وارد می شود تشخیص دهند و این دلیل گرد بودن بازوهای اینگونه ربات ها به شمار میرود. ضمناً این رباتها فاقد موتورهایی هستند که امکان انفجار داشته باشد. این موتورها و کلیه سیم و کابلها از داخل ربات عبور داده می شوند تا این طراحی کامپکت، ایمنی آنها را افزایش دهد.
معرفی برترین کوباتهای جهان و مقایسه قابلیت ها و ویژگیها
– کوبات شرکت FANUC با نام فانوک سبز
شرکت FANUC به عنوان بزرگترین فروشنده رباتهای صنعتی در جهان، در سال ۲۰۱۵ میلادی از اولین کوبات خود به نام فانوک سبز CR-35iA رونمایی کرد. شرکت FANUC در جهان با رنگ زرد لوگو و محصولاتش شناخته می شود و این اولین ربات این شرکت ژاپنی بود که به رنگ سبز تولید گردید. CR-35iA در حال حاضر، رکورد دار بیشترین میزان حمل بار (به انگلیسی : Payload) مابین کوبات های تولید شده در جهان با قابلیت حمل بارهایی به وزن ۳۵ کیلوگرم می باشد و این قابلیت، زمینه مناسبی برای بکارگیری این کوبات در کاربردهای مختلف صنعتی را فراهم نموده است. از آنجا که اکثر کوبات های تولید شده در بازار دارای اندازه کوچکی میباشند، سطح دسترسی آن ها کوچک و قابلیت حمل بارهای سبک را دارند و این ویژگی فانوک سبز، بدان معناست که از آن میتوان در کاربردهای بیشتری نسبت به رقبا استفاده نمود. در مقابل، اندازه بزرگتر کوبات و وزن بیشتر بدان معناست که این کوبات قابلیت جابجایی از یک ایستگاه کاری به ایستگاه دیگر را به سادگی نداشته و می بایست به زمین فیکس شود و این امر انعطاف پذیری فانوک سبز را کاهش میدهد. شرکت FANUC در همین راستا در سال ۲۰۱۶ دومین کوبات شش محور خود را به نام CR-7iA در اندازه کوچکتر و با قابلیت حمل بار تا ۷ کیلوگرم به بازار عرضه نمود. با این وجود برگ برنده فانوک سبز در بازار کوباتها ، میزان حمل بار و سطح دسترسی آن به شمار می رود. قابلیت هدایت دستی، پوسته خارجی محکم ولی نرم از دیگر مزایای این کوبات به شمار می رود.

– کوبات شرکت ABB با نام YUMI
شرکت ABB به عنوان یکی از نام آورترین شرکت های تولید کننده رباتهای صنعتی در جهان، در سال ۲۰۱۳ از اولین کوبات خود به نام FRIDA (مخفف عبارت Friendly Robot for Industrial Dual-Arm) رونمایی نمود که در آن زمان، انقلابی در زمینه رباتیک به شمار می رفت. این ربات ۱۴ محوره بگونه ای طراحی شده بود که بصورت کاملاً ایمن بتواند کنار انسان ها کار کند و ایمنی آنها را تضمین نماید. شرکت ABB در سال ۲۰۱۵ از نسخه تکامل یافته آن به نام YUMI (مخفف عبارت You and Me) در نمایشگاه هانوفر رونمایی نمود. ABB ادعا می نماید که این ربات قادر است تمامی اشیاء سبک از یک ساعت سوئیسی تا یک تبلت و یا حتی یک نی نوشابه را بردارد. این ربات فوق العاده ایمن، از قابلیت های بسیاری همچون سیستم ویژن، گریپر دوتایی و توابع کنترلی پیشرفته ای برای حرکت برخوردار است. هر کدام از بازوهای هفت محوره این ربات قادر به جابجایی ۰٫۵ کیلوگرم بار با سطح دسترسی ۵۵۹ میلمتری با دقت ۰٫۰۲ هستند. دقت بالای این کوبات آن را برای کاربردهای مونتاژ قطعات الکترونیکی ایده ال می نماید. YUMI از ابزاری بنام End Effector به منظور برداشتن اجسام و یا انجام کارهای متفاوت استفاده می کند که بسته به کاربرد، انواع مختلفی از آن توسط ABB طراحی و ارائه شده است. قیمت این کوبات حدود ۴۰ هزار دلار تعیین شده است.

– کوبات شرکت KUKA با نام LBR iiwa
IIWA (مخفف عبارت Intelligent Industrial Work Assistant)، نام کوبات شرکت کوکا است که به منظور استفاده در کاربردهای پیچیده اتوماسیونی و فعالیت های مونتاژ در سال ۲۰۱۳ به بازار عرضه شد. این کوبات که بر پایه دست انسان طراحی شده است دارای هفت محور است. در هر مفصل، سنسورهایی تعبیه شده است که امکان کنترل موقعیت و حساسیت کوبات را فراهم می نماید. اندازه بسیار کوچک آن سبب می شود که در فضاهای کوچک و در خطوط مونتاژ بهم فشرده بخوبی قابل استفاده باشد. این کوبات در دو مدل طراحی شده و میتواند مقادیر ۷ و ۱۴ کیلوگرم بار را جابجا نماید و بطور ایمن در کنار انسانها کار کند. شرکت کوکا با توسعه رباتهای سبک وزن برای کاربردهای صنعتی، قابلیت های جدیدی در اتوماسیون صنعتی پدید آورد.

– کوبات شرکت Yaskawa Motoman به نام HC10
شرکت Yaskawa Motoman به عنوان یکی از برندهای مطرح در ساخت رباتهای صنعتی، همواره به جهت تنوع بالا در ارائه محصولات مختلف در مقایسه با سایر رقبا شناخته شده است، اما این شرکت در حوزه کوبات ها تا حدودی از سایر رقبا عقب افتاده است. اولین کوبات این شرکت که HC10 نام دارد و در سال ۲۰۱۶ به بازار عرضه گردید، دارای شش محور بوده قابلیت حمل ۱۰ کیلوگرم بار را داراست. با این وجود اگر از قابلیت های خاص کوبات ها صرفه نظر شود، این شرکت مجموعه متنوعی از رباتهای کوچک تک بازو و دوبازو با قابلیت حمل بار از ۵ تا ۴۰ کیلوگرم را در سری های SIA و SDA طراحی و به بازار عرضه نموده است. به عنوان نمونه SDA20F، یک مدل از رباتهای صنعتی این شرکت با دو بازو و ۱۵ محور است و میتواند در کاربردهای پیچیده مونتاژ و بسته بندی مورد استفاده قرار گیرد. هردو بازوی این ربات میتوانند با هم کار کنند و کلیه کابل ها و محرکهای سروی آن از داخل ربات عبور داده شده است. SDA20F به علت عدم برخورداری از شرایط ایمنی کوباتها، جزء ربات های صنعتی کوچک دسته بندی می شود.

– کوبات شرکت دانمارکی Universal Robots با نام UR3
شرکت UR که در سال ۲۰۰۵ با هدف طراحی و تولید کوباتها پایه گذاری شده است، از جمله شرکت های برتر در زمینه طراحی و ساخت کوبات ها به شمار می رود و تاکنون سه مدل UR5، UR10 و UR3 را به بازار عرضه نموده است. اولین کوبات این شرکت مدل UR5 بود که در سال ۲۰۰۹ به بازار عرضه شد. UR5 با برخورداری از شش محور و وزن ۱۸ کیلوگرمی، قادر به جابجایی بار تا ۵ کیلوگرم با سطح دسترسی ۸۵۰ میلیمتر بود. این شرکت در سال ۲۰۱۲، مدل جدید UR10 را با قابلیت جابجایی بار تا ۱۰ کیلوگرم و سطح دسترسی ۱۳۰۰ میلیمتر به بازار معرفی نمود. آخرین مدل این شرکت، کوباتUR3 است که در سال ۲۰۱۵ به بازار ارائه شد و عنوان منعطف ترین کوبات دنیا را از آن خود کرد. UR3، یک ربات سبک وزن رومیزی است که می تواند بدون نیاز به محافظ در کنار انسان ها در محیط صنعتی مشغول به کار باشد. این ربات رومیزی با ۶ محور و ۱۱ کیلوگرم وزن، توانایی جابجایی بارهایی تا وزن ۳ کیلوگرم را دارد. ضمن اینکه قابلیت ۳۶۰ درجه چرخش در مفاصل این بازوی روباتیک گنجانده شده است.
