
تبیین مفهوم کنترل حرکت و معرفی انواع کاربردهای آن
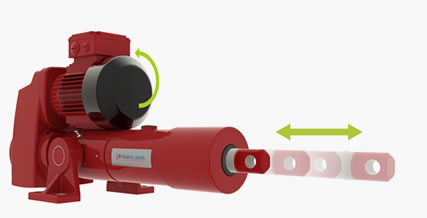
کاربردهای کنترل حرکت (به انگلیسی : Motion Control) به عنوان زیر مجموعه ای از سیستم های مدرن اتوماسیون صنعتی، به کاربردهایی اشاره دارد که در آن به کنترل بخشهای متحرک ماشین آلات و تجهیزات پرداخته می شود. به بیانی دیگر، دستیابی به حرکت کنترل شده و دقیق بخشهای متحرک ماشین آلات و تجهیزات به دو شکل کلی موقعیت یابی (به انگلیسی : Positioning) و انطباق (به انگلیسی : Synchronism)، اهداف اصلی سیستمهای کنترل حرکت به شمار می رود. سیستمهای کنترل حرکت به دو شکل کلی سیستمهای حلقه باز و سیستمهای حلقه بسته قابل پیاده سازی و اجرا می باشند. تفاوت اصلی سیستمهای حلقه باز با سیستمهای حلقه بسته در آن است که در حالت نخست، کنترلر فرامین لازم جهت نیل به حرکت مدنظر را از طریق تجهیزات واسط به محرک ارسال می نماید و اطلاعی از موقعیت و حرکت نهایی محرک نداشته و فیدبکی از آن دریافت نمیکند، حال آنکه در سیستمهای حلقه بسته، موقعیت دقیق محرک در هر لحظه از زمان توسط وسایل اندازه گیری سنجیده و به کنترلر ارسال می گردد و بدین ترتیب کنترلر میتواند میزان خطاهای موجود را شناسایی و برطرف نماید. به عنوان مثال، یک سیستم درایو ساده شامل یک موتور القایی و یک درایو الکتریکی را در نظر بگیرید که در آن حرکت دورانی شفت موتور از طریق چند چرخ دنده به یک حرکت خطی مبدل گردیده است. اگر در این سیستم، هدف جابجایی محرک به میزان ۱۰۰ میلی متر باشد، بدیهی است که میزان چرخش شفت موتور می بایست بصورت کاملاً دقیق محاسبه شود. از طرفی از آنجا که این محاسبات بسته به عوامل خارجی همچون میزان اصطکاک مابین چرخ دنده ها، اینرسی، دمای محیط و… وابسته است رسیدن به جابجایی دقیقاً ۱۰۰ میلیمتر از طریق این مکانیزم تقریباً غیرممکن است. چرا که درایو الکتریکی بر مبنای پارامترهای تعیین شده، میزان توان مورد نیاز را محاسبه و آنرا به موتور اعمال می نماید ولی از آنجا که فیدبکی از موقعیت محرک ندارد، احتمال شکست در محاسبات بسیار زیاد است. این سیستم نمونه ای از یک سیستم ساده کنترل حرکت بدون فیدبک یا بصورت حلقه باز (به انگلیسی : Open Loop) است.
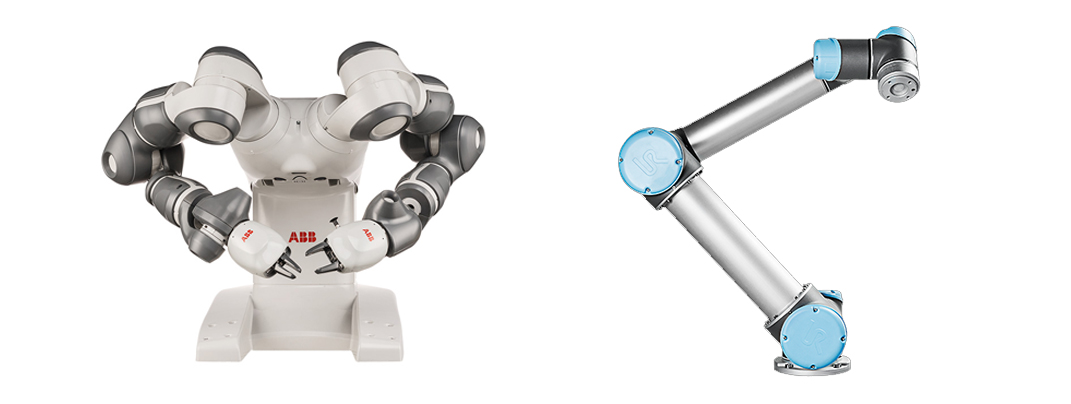
حال فرض کنید موقعیت ۱۰۰ میلی متر با یک سنسور شناسایی و به درایو اعلام شود. در این حالت درایو میتواند تا رسیدن محرک به موقعیت، توان را به موتور اعمال نماید و با محاسبات ساده تر به نتیجه بهتری دست یابد. در حالت پیشرفته تر با استفاده از یک انکدر و در اختیار داشتن گام حرکتی محرک، میتوان محرک را بصورت دقیق در هر موقعیتی تنظیم نمود. این حالت نمونه یک کاربرد کنترل حرکت حلقه بسته (به انگلیسی : Closed Loop) است. امروزه کاربردهای کنترل حرکت در صنایع مختلف به شدت روبه گسترش است و تقریباً در اکثر صنایع، نمونه هایی از کاربردهای کنترل حرکت به چشم می خورد. یکی از نمونه های عینی کنترل حرکت، ربات های صنعتی می باشند که در آن ها با استفاده از سروموتورها و سنسورها و سیستم های اندازه گیری دقیق موقعیت همچون رزولورها (به انگلیسی : Resolver) و انکدرها (به انگلیسی : Encoder)، موقعیت یابی دقیق حرکتی برای محورهای ربات حاصل می گردد. نمونه دیگر، ماشین های CNC می باشند که امروز به طور گسترده در صنایع مختلف مورد استفاده قرار می گیرند.
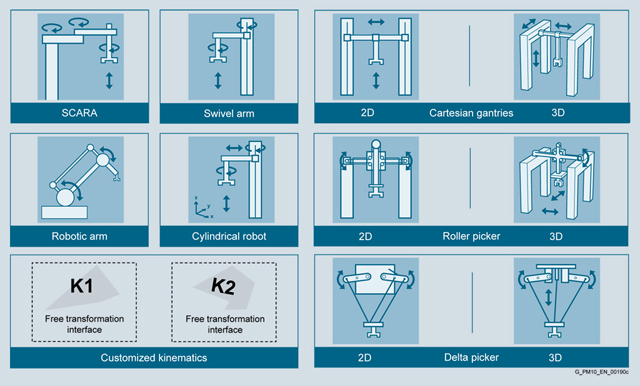
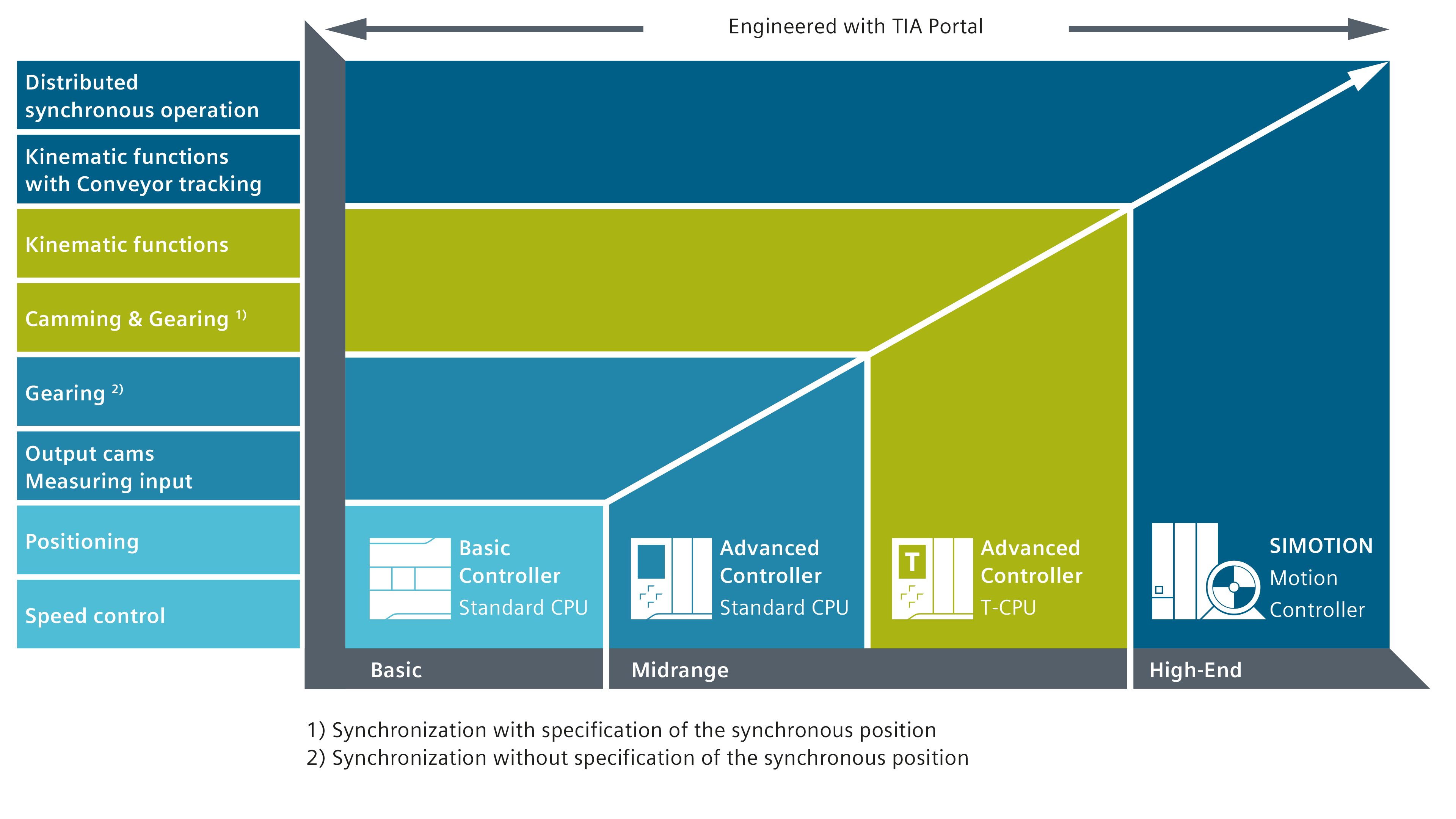
همانگونه که بیان گردید کنترل حرکت به دو شکل موقعیت یابی و انطباق مورد استفاده قرار می گیرد. منظور از موقعیت یابی، جابجایی یک شئی از یک نقطه به نقطه دیگر است که خود به دو دسته موقعیت یابی مطلق (به انگلیسی : Absolute Positioning) و موقعیت یابی نسبی (به انگلیسی : Relative Positioning) قابل پیاده سازی می باشد. در موقعیت یابی مطلق، شئی می بایست به موقعیت معینی مثلاً ۱۰۰ میلی متر در راستای طول نسبت به نقطه مبداء منتقل شود اما در موقعیت یابی نسبی، شئی می بایست به میزان معینی مثلاً ۱۰۰ میلی متر نسبت به نقطه فعلی منتقل گردد. شکل دوم کاربردهای کنترل حرکت بصورت انطباق می باشد. منظور از انطباق، جابجایی یک شئی بصورت سنکرون (همزمان یا هماهنگ) با شئی دیگری است. انطباق نیز به سه شیوه انطباق خطی (به انگلیسی : Linear Synchronism)، انطباق غیرخطی (به انگلیسی : Non Linear Synchronism) و انطباق دو یا سه بعدی (به انگلیسی : 2D/3D Synchronism) تقسیم بندی می شود. نمونه هایی از انواع کاربردهای کنترل حرکت در شکل زیر نمایش داده شده است.
معرفی محصولات شرکت زیمنس در زمینه کاربردهای کنترل حرکت
شرکت زیمنس به عنوان یکی از شرکت های پیشرو در حوزه اتوماسیون صنعتی، پکیج کاملی از محصولات خود را در زمینه کاربردهای کنترل حرکت، در قالب خانواده «SIMOTION» طراحی و به بازار عرضه نموده است. این محصولات مطابق شکل زیر بسته به نوع ماشین، شامل سه پلتفرم سختافزاری SIMOTION D ،SIMOTION C و SIMOTION P به ترتیب مبتنی بر سیستمهای درایو، PLCها و پنل های زیمنس می باشند.

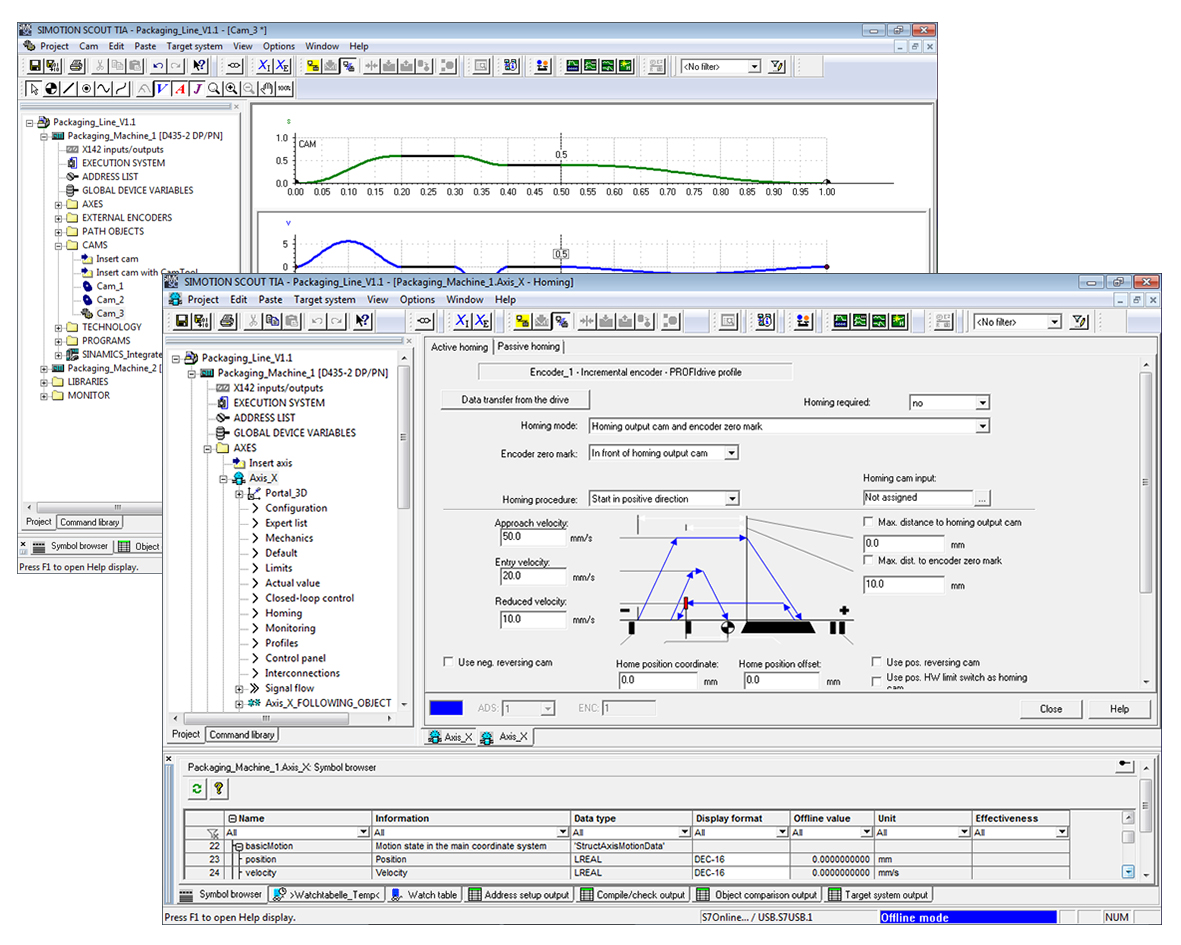
تا پیش از ارائه پرتال TIA، پیکرهبندی، برنامهنویسی و راهاندازی این تجهیزات از طریق نرمافزار SIMOTION SCOUT صورت میپذیرفت. این نرمافزار با عنوان SCOUT TIA، از نسخه چهاردهم به پرتال TIA افزوده شد و با برخورداری از قابلیتهایی همچون محیط گرافیکی کاربرپسند، برخورداری از توابع از پیش برنامهنویسی شده، امکان برقراری ارتباط آسان با PLC ها، HMIها و درایوهای سری SINAMICS S120، امکان پیادهسازی سریعتر و آسانتر پروژههای کنترل حرکت را فراهم نمود. SCOUT TIA V5.1 نسخه قابلاستفاده در TIA Portal V14 SP1 میباشد که در حال حاضر تنها از دو پلتفرم SIMOTION C و SIMOTION D پشتیبانی مینماید.
شمای ظاهری نرم افزار SIMotion Scout در شکل زیر نشان داده شده است :