
شاخصهای فنی به هنگام انتخاب یک کوبات یا ربات صنعتی
در این بخش به تشریح پارامترها و شاخص های فنی و تأثیرگذار به هنگام انتخاب یک ربات صنعتی برای یک کاربرد مشخص پرداخته می شود. به منظور آموزش کاربردی این مفاهیم، یک نمونه ربات صنعتی شرکت ABB از مدل IRB6400 انتخاب گردیده و این شاخص ها و پارامترهای کاربردی برای آن ذکر می شود، تا خواننده درک صحیح تری از این مطالب داشته باشد. شکل ظاهری منیپولیتور و کنترلر این ربات در شکل زیر نشان داده شده است.

-تعداد محورها و تعداد درجات آزادی ربات
اولین و مهمترین فاکتور در انتخاب یک ربات، تعداد درجات آزادی آن (به انگلیسی : Degree Of Freedom) است و این فاکتور معرف میزان انعطاف پذیری ربات برای استفاده در کاربرد مورد نظر است. در یک تعریف کلی، به حداقل تعداد مختصات لازم برای مشخص کردن موقعیت یک جسم، تعداد درجات آزادی آن جسم گفته می شود. به بیان دیگر، یک جسم دارای n درجه آزادی است، اگر مشخصات کامل موقعیت آن را بتوان با n پارامتر تعیین کرد و n، حداقل مشخصات موردنیاز باشد. می دانیم که موقعیت هر نقطه در یک صفحه با دو مولفه x و y مشخص می شود که این دو مولفه به ترتیب بیانگر موقعیت نقطه در راستای محور طول و محور عرض می باشد و ربات نیز به منظور دسترسی به هر نقطه در یک صفحه، حدقل به دو محور حرکتی، یکی در راستای طول و دیگری در راستای عرض نیاز دارد. به طریق مشابه برای دسترسی ربات به هر نقطه دلخواه در فضا (x،y وz) حداقل سه محور موردنیاز است، اما نکته ای که می بایست بدان توجه شود آن است که از زوایای متفاوتی میتوان به یک نقطه در فضا دسترسی داشت. به بیان دیگر، نقطه کار گیر ربات (به انگلیسی : Work Object) از بی نهایت مسیر متفاوت میتواند از یک نقطه در فضا به نقطه دیگری منتقل شود. به منظور تعیین مسیر حرکت ربات از یک نقطه به نقطه دیگر، می بایست زاویه حرکت در راستای سه محور نیز برای ربات تعریف شود. این امر مستلزم اضافه شدن یک محور اضافی برای حرکت در صفحه و اضافه شدن سه محور دیگر به منیپولیتور ربات جهت حرکت در فضای سه بعدی است. پس بطور خلاصه، تعداد درجات آزادی یک ربات که توسط مختصات نقطه کارگیر ربات تعیین می شود، در صفحه برابر سه و در فضا برابر شش است. نکته دیگری که می بایست بدان توجه شود آن است که تعداد درجات آزادی ربات با تعداد درجات حرکتی آن (به انگلیسی : Degree Of Mobility) متفاوت است. تعداد مفاصل ربات، تعداد درجات حرکت ربات را مشخص می کند. همواره درجه حرکت، بزرگتر یا مساوی درجه آزادی است و به اختلاف درجه حرکت از درجه آزادی، درجه اضافی حرکت گفته می شود. بدیهی است هر چه درجه اضافی حرکت بیشتر شود انعطاف پذیری ربات بیشتر می شود اما هزینه آن بالاتر رفته و کنترل آن سخت تر می گردد.
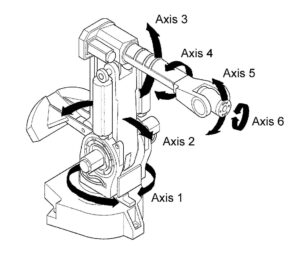
امروزه اکثر منیپولیتورهای ربات های صنعتی دارای ۶ محور حرکتی می باشند تا حرکت ربات بصورت دقیق در فضای سه بعدی قابل تعریف باشد. ربات IRB6400 که از مدل های قدیمی شرکت ABB به شمار می رود نیز یک ربات با شش محور و شش درجه آزادی می باشد که محورهای آن در شکل زیر نشان داده شده است. با این حال بسیاری از سازندگان ربات، بسته به کاربردهای مختلف تعدادی محور خارجی برای ربات در نظر میگیرند که این محورهای خارجی توسط کنترلر ربات هدایت می شوند. به عنوان مثال فرض کنید لبه پیرامونی قطعه ای می بایست توسط ربات آغشته به چسب گردد. ربات، میتواند قطعه را بردارد و آنرا در فضای سه بعدی حرکت دهد اما به منظور ایجاد سطح یکنواختی از چسب روی قطعه، لازم است تا پس از قرار گیری سر نازل روی لبه قطعه، نازل در موقعیت های معین با زوایای مشخصی بچرخد. انجام این کار از طریق ۶ محور ربات به سختی امکان پذیر است اما در صورت اضافه نمودن یک محور خارجی به ربات(محور هفتم) این امر به آسانی قابل دستیابی است. در این حالت نازل که به یک سروموتور متصل شده است توسط کنترلر ربات کنترل میشود و همزمان با حرکت ربات، سروموتور، نازل را می چرخاند و سطح یکنواختی از چسب روی قطعه قرار می گیرد. این مثال، نمونه ساده ای از استفاده از محورهای خارجی در رباتهای صنعتی می باشد.
– فضای کاری و سطح دسترسی
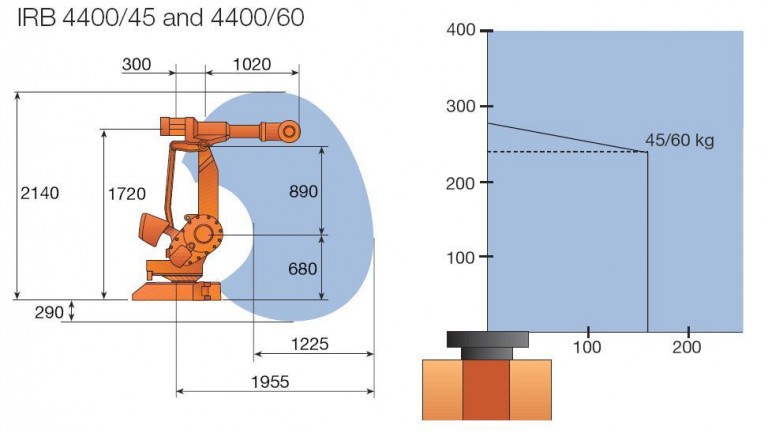
به محدوده ای که ربات بدان دسترسی دارد و نقطه کارگیر ربات میتواند در آن فضا جابجا شود فضای کاری ربات (به انگلیسی : Work Envelope) گفته می شود. این فضا در ربات های بند بند (به انگلیسی : Articulated (Joint Arm) Robot)، عموماً به صورت یک منحنی کروی شکل می باشد که با حرکت ربات به سمت جلو و عقب، بالا و پایین بدست می آید. حجم فضای کاری ربات به طراحی محورها و طول آنها بستگی دارد. در کاتالوگ رباتها، معمولاً مقطع دوبعدی از این فضا به صورت یک منحنی بسته رسم می شود. همچنین به ماکزیمم مسافتی که ربات در فضای کاری خود می تواند بدان دست یابد سطح دسترسی ربات (به انگلیسی : Reach) گفته می شود. این دو پارامتر از پارامترهای کلیدی به هنگام انتخاب ربات برای کاربردهای مختلف به شمار می روند. ربات IRB6400 شرکت ABB، بسته به کاربرد در مدلهای مختلفی تولید شده است که فضای کاری و سطح دسترسی برای سه مدل از این ربات در شکل زیر نشان داده شده است. همانگونه که از این شکل مشخص است نوع طراحی بازوهای ربات و طریقه نصب آن بصورت ایستاده (به انگلیسی : Floor Mounted) یا بصورت نصب روی سکو (به انگلیسی : Shelf)، بطور کامل فضای کاری و سطوح دسترسی ربات را تغییر می دهد.
– ظرفیت وزنی
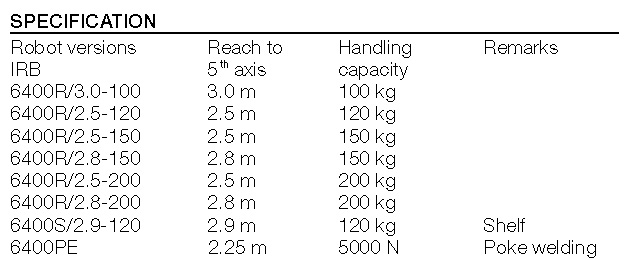
حداکثر وزن ابزار با قطعاتی که توسط بند انتهایی منیپولیتور قابل حمل است، بدون آنکه به دقت و سرعت ربات لطمه ای وارد نماید را ظرفیت وزنی یا بار مجاز ربات (به انگلیسی : Payload or Handling Capacity) می نامند که این پارامتر نیز از پارامترهای بسیار مهم به هنگام انتخاب ربات برای یک کاربرد مشخص به شمار می رود. بدیهی است زمانیکه ربات برای کاربرد مشخصی به عنوان مثال جوش نقطه ای مورد استفاده قرار میگیرد ابزار متناسب با آن کاربرد ( در این مثال، گان جوشکاری) می بایست به نقطه کارگیر ربات متصل شود و ربات قادر به جابجایی آن در سیکلهای پیوسته باشد بدون آنکه آسیبی به ربات وارد شود. بنابراین در هر کاربرد می بایست وزن و ابعاد تجهیزات و ابزار متصل به ربات را تعیین و سپس اقدام به انتخاب ربات نمود. ربات IRB6400 بسته به مدل های مختلف، قابلیت حمل ابزار از ۱۰۰ تا ۲۰۰ کیلوگرم را دارا می باشد که جزئیات آن در جدول ذیل نشان داده شده است.
– دقت
میزان اختلاف، مابین مختصات عددی یک نقطه در نرم افزار ربات و مکانی که ربات در واقعیت به آن حرکت کرده است میزان دقت عملکردی ربات (به انگلیسی : Precision) را معین مینماید. به عبارت دیگر، پارامتر دقت مشخص می کند ربات با چه دقتی میتواند به نقطه تعریف شده دست یابد.
– سرعت و شتاب حرکت ربات
حداکثر سرعت حرکت هر یک از محورها و حداکثر شتاب قابل ارائه به هر یک از محورهای ربات با وجود بار مشخص از دیگر پارامترهای فنی در انتخاب یک ربات صنعتی می باشد.
– تکرارپذیری
مقدار اختلاف مکانی ربات در چندین بار حرکت به یک نقطه را پارامتر تکرارپذیری (به انگلیسی : Repeatability) می نامند. در واقع این پارامتر مشخص می کند ربات تا چه میزان در سیکل های حرکتی یکسان دقیق است.
– رنج کاری محورهای ربات
میزان چرخش یا خمش هر یک از محورهای ربات از دیگر پارامترهایی است که به هنگام انتخاب ربات می بایست مدنظر قرار گیرد.
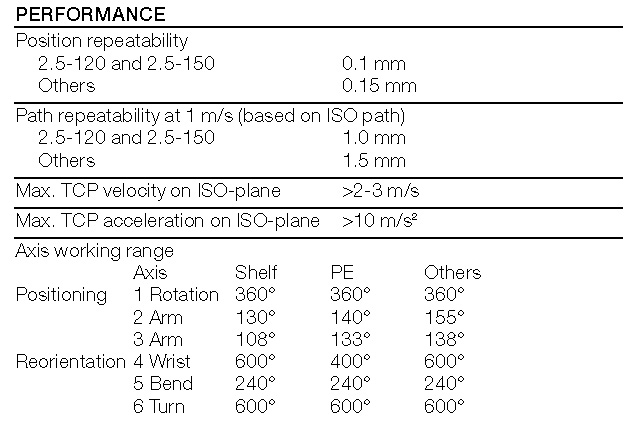
چهار پارامتر دقت، سرعت و شتاب حرکتی، تکرارپذیری و رنج کاری محورهای ربات معرف کارایی ربات می باشند. این مقادیر برای ربات IRB6400، در جدول ذیل ارائه شده اند.
علاوه بر موارد بیان شده، مواردی همچون شرایط محیط، وزن منیپولیتور، ولتاژ تغذیه، امکان کار در محیط های انفجاری و حاوی مواد و گازهای قابل انفجار، قابلیت های کنترلر و امکان ارتباط با تجهیزات جانبی از دیگر پارامترهای مهم در انتخاب یک ربات مناسب برای کاربرد مدنظر است. در پایان ذکر این نکته نیز لازم است که معمولاً سازندگان ربات، کاربردهای اصلی هر مدل از رباتهای خود را ذکر می کنند که این امر کمک شایانی به انتخاب یک ربات مناسب برای کاربرد مدنظر می نماید.