
تعریف ربات و اجزاء تشکیل دهنده آن
موسسه رباتیک آمریکا (به انگلیسی : (Robotics Institute of America (RIA) به عنوان یکی از شرکت های با سابقه در صنعت رباتیک و تولید بازوهای صنعتی یا منیپولیتورها (به انگلیسی : Manipulators)، ربات را اینگونه تعریف میکند:
“ربات، یک جابجا کننده چند منظوره ی قابل برنامه پذیری است که برای حرکت دادن مواد، قطعات، ابزار یا وسایل خاص، از حرکات برنامه ریزی شدهِ قابل تغییر برای تحقق فرامین مختلف استفاده می نماید.”
استاندارد ISO8373 نیز، ربات صنعتی را یک بازویِ مکانیکیِ چند منظوره می خواند که از امکان برنامه ریزی مجدد و کنترل خودکار برخودار بوده و حداقل در سه محور (سه درجه آزادی) قابل برنامه ریزی است.
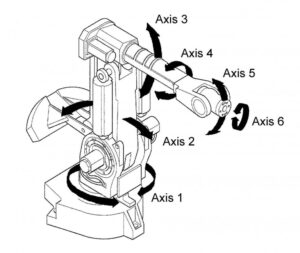
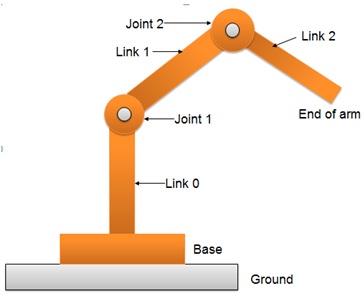
بطور کلی، ربات از دو بخش بازوی مکانیکی(منیپولیتور) و کنترلر تشکیل شده است. گاهی به اشتباه منیپولیتور نیز ربات خوانده می شود، حال آنکه بازوی مکانیکی(منیپولیتور) با ربات متفاوت است. ربات برخلاف منیپولیتور توسط یک میکروپروسسور یا کامپیوتر کنترل می شود و با فیدبک های که از بخش های مختلف می گیرد معمولاً بصورت خودکار هدایت می شود، حال آنکه منیپولیتور یک بازوی مکانیکی است که عموماً توسط انسان کنترل و هدایت می شود. یک نمونه منیپولیتور در شکل زیر نشان داده شده است.

با این توضیح میتوان گفت منیپولیتور تنها میتواند بخشی از یک ربات باشد. به بیان دیگر، ربات متشکل از مجموعه ای از محورها (لینکها) است که این محورها از طریق مفصل هایی بهم متصل شده اند. هر مفصل (به انگلیسی : Joint) معمولاً دارای یک محرک مانند یک موتور الکتریکی یا سیلندر هیدرولیکی است که سبب ایجاد حرکت محورها نسبت به یکدیگر می گردد. این مجموعه که منیپولیتور نامیده می شود، توسط یک کنترلر، هدایت و کنترل می شود.
شش ساختار اصلی مورد استفاده در طراحی ربات های صنعتی با پایه ثابت
ربات های صنعتی از یک نگاه به دو گروه پایه متحرک و پایه ثابت تقسیم می شوند. ربات های متحرک، ربات هایی هستند که کل ربات توسط چرخ یا وسیله دیگری جابجا می شود، اما در ربات های با پایه ثابت، همواره یکسوی منیپولیتور به یک پایه ثابت متصل می گردد. اکثر ربات های کنونی به علت سادگی ساخت، صرفه اقتصادی و برخی محدودیت های تکنولوژی به صورت با پایه ثابت ساخته شده اند، اما پیش بینی می شود تا ۴۰ سال آینده تمامی ربات ها به صورت متحرک تولید شوند. ربات های صنعتی با پایه ثابت بر اساس نوع سه مفصل اول، به شش گروه ذیل تقسیم می شوند :
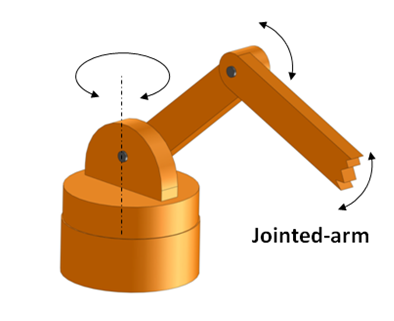
– دسته اول : ربات با منیپولیتور بند بند (به انگلیسی : Articulated)
ربات هایی که سه مفصل اول منیپولیتور آن، لولایی باشد و محور مفصل دوم و سوم موازی و عمود بر محور مفصل اول باشد را ربات بند بند گویند. پیکر بندی این نوع ربات بسیار شبیه دست انسان می باشد و در نتیجه دارای انعطاف بالایی در کار با اشیا و دستگاه ها است.
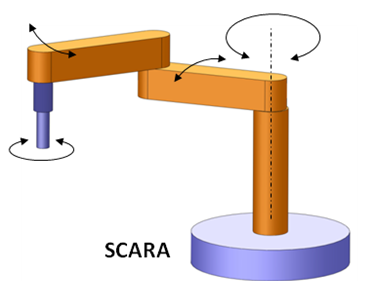
– دسته دوم : ربات با منیپولیتور اسکارا (به انگلیسی : SCARA)
ربات هایی که دو مفصل اول، لولایی و مفصل سوم کشویی باشد و محور سه مفصل اول، موازی باشد را ربات اسکارا گویند. مزیت این ربات سرعت افقی آن می باشد.
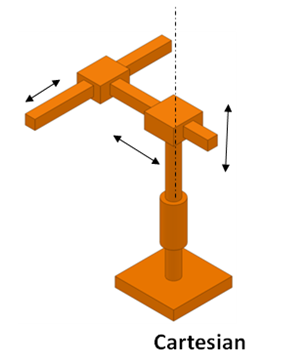
– دسته سوم : ربات با منیپولیتور کارتزین یا مستطیلی (به انگلیسی : Cartesian)
ربات هایی که سه مفصل اول آن، کشویی باشد و محور سه مفصل اول دو به دو بر هم عمود باشند را ربات مستطیلی گویند. مزیت این ربات ها، قدرت و تحلیل ساده ی آن می باشد.
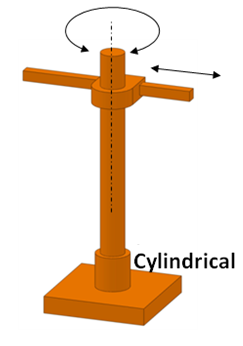
– دسته چهارم : ربات با منیپولیتور استوانه ای (به انگلیسی : Cylindrical)
ربات هایی که مفصل اول آن لولایی و مفصل دوم وسوم آن کشویی باشد و محورهای مفاصل اول و دوم موازی و بر محور مفصل سوم عمود باشد را ربات استوانه ای گویند.
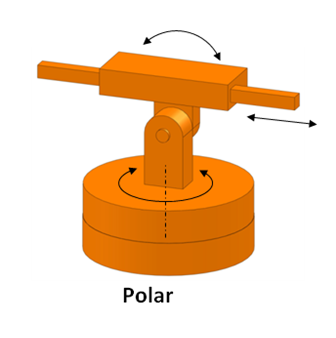
– دسته پنجم : ربات با منیپولیتور کروی یا قطبی (به انگلیسی : Spherical or Polar)
رباتی که مفصل اول و دوم آن لولایی و مفصل سوم آن کشویی باشد و محور مفصل اول بر محور مفصل دوم عمود باشد همچنین محور مفصل سوم بر محور مفصل دوم عمود باشد را ربات کروی گویند . دقت شود محور های مفاصل اول و سوم لزوماً عمود نیستند.
– دسته ششم : ربات با منیپولیتور موازی (به انگلیسی : Parallel)
رباتی که سه مفصل اول آن همزمان، یا کشویی و یا لولایی باشد را ربات موازی گویند. ویژگی مهم این ربات قدرت آن می باشد.

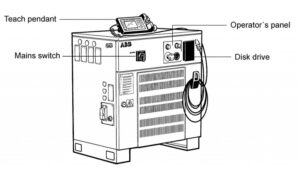
اکثر ربات های صنعتی امروزی، دارای منیپولیتورهای شش محوره با پایه ثابت از دسته اول (Articulated) می باشند. از دیگر منیپولیتورهای پرکاربرد میتوان به منیپولیتور از نوع اسکارا، موازی و کارتزین اشاره نمود. بخش دیگر ربات، کنترلر آن است که شامل مدارهای کنترلی و تغذیه جهت کنترل منیپولیتور، محورهای خارجی و تجهیزات جانبی است. کنترلر همچنین وظیفه پردازش برنامه های کنترلی و ایمنی ربات را برعهده دارد. کنترلر ربات خود از اجزاء دیگری همچون تابلوی کنترل، پنل اپراتوری و تیچ پندنت (به انگلیسی : Teach Pendant) تشکیل شده است. یک نمونه ربات صنعتی شرکت ABB به همراه کنترلر آن در شکل زیر نشان داده شده است.