به منظور بهره برداری از یک ربات صنعتی در کاربردهای مختلف، از ابزار متفاوتی استفاده می شود. از آنجا که موقعیت و نحوه حرکت ابزار در فضای سه بعدی در انجام کاربرد مورد نظر از اهمیت خاصی برخوردار است، شرکت های سازنده ربات های صنعتی به منظور تسهیل هدایت دستی ربات ها توسط کاربر و کاهش مدت زمان برنامه نویسی، تیچ و راه اندازی، همچنین کاهش مدت زمان لازم جهت اصلاح موقعیت نقاط حرکتی در برنامه های نوشته شده، اقدام به تعریف دستگاه های مختصات متنوعی برای ربات های خود نموده اند. بطور کلی دستگاه مختصات را میتوان صفحه یا فضایی که توسط محورهایی که از یک نقطه مرجع نشئت می گیرند تعریف نمود. از آنجا که آگاهی از انواع دستگاه های مختصات و سیستم های تعیین موقعیت ربات در فضای سه بعدی، اولین گام در آشنایی با روش های برنامه نویسی یک ربات صنعتی است، در این بخش، به معرفی دستگاه های مختصات متداول برای رباتهای صنعتی شرکت ABB می پردازیم:
۱- دستگاه مختصات پایه (به انگلیسی : Base Coordinate System)
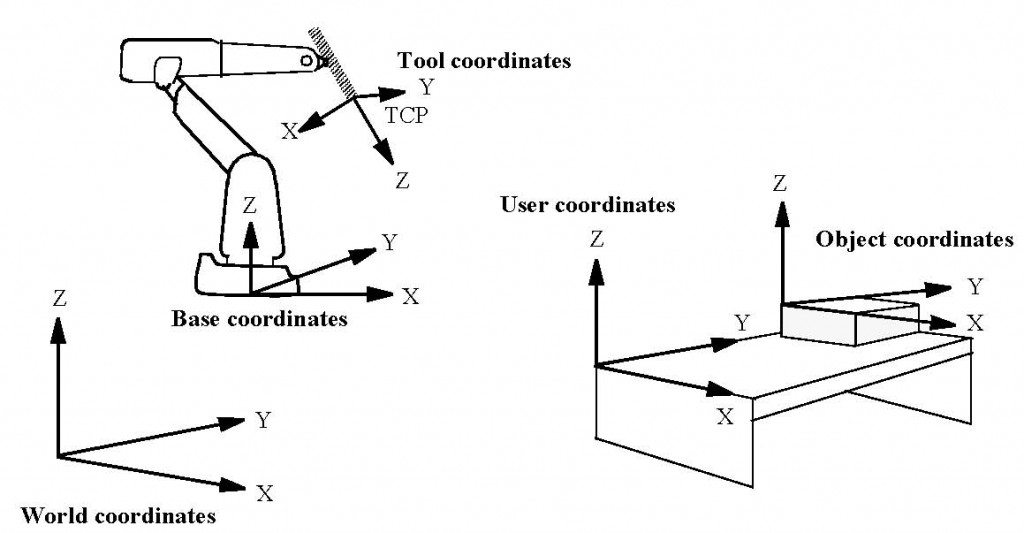
ساده ترین شیوه برای حرکت ربات از یک موقعیت به موقعیت دیگر، استفاده از دستگاه مختصات پایه یا بیس است. این دستگاه مختصات روی پایه ربات قرار گرفته و مبدأ آن از تقاطع محور ۱ و سطح افقی پایه نصب ربات مشخص می شود. محورهای X و Y در صفحه پایه نصب ربات قرار گرفته اند. محور X ها به سمت جلو، محور Y ها به سمت چپ و محور Z ها به سمت بالا اشاره دارد.
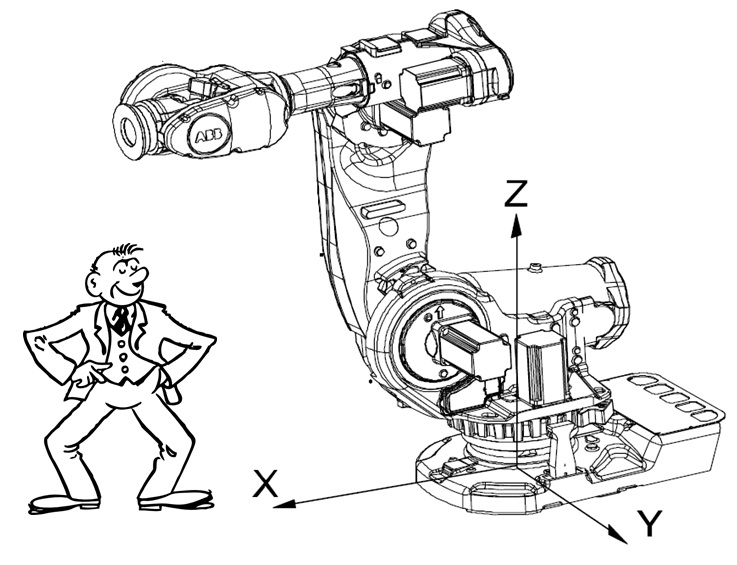
استفاده از این دستگاه مختصات، حرکات ربات را قابل پیش بینی می نماید. با فرض پیکره بندی نرمال ربات، با ایستادن در مقابل ربات و حرکت ربات بصورت دستی، میتوان با کشیدن اهرم گردان تیچ پندنت به سمت بالا و پایین، ربات را در راستای محور Xها، با حرکت دادن اهرم گردان به طرفین آنرا در راستای محور Y ها و با چرخاندن اهرم گردان، ربات را در راستای محور Z ها جابجا نمود. از این دستگاه مختصات، در کاربردهای ساده برنامه نویسی استفاده می گردد. ضمناً اگر هیچگونه دستگاه مختصاتی تعریف نشده باشد موقعیت ربات در دستگاه مختصات پایه تعریف می گردد.
۲- دستگاه مختصات جهانی (به انگلیسی : World Coordinate System)
اگر ربات بصورت ایستاده روی کف سالن نصب گردد، استفاده از دستگاه مختصات پایه به منظور برنامه نویسی ربات مناسب خواهد بود اما اگر ربات بصورت معکوس و از سقف نصب گردیده باشد، جهت حرکت محورها در این حالت با جهت حرکت محورها در حالت نصب مستقیم متفاوت بوده و برنامه نویسی در دستگاه مختصات پایه دشوار خواهد بود. در این موارد از دستگاه مختصات جهانی استفاده می شود که مهم ترین و پرکاربردترین دستگاه مختصات ربات به شمار می رود و سایر دستگاه های مختصات چه بصورت مستقیم و چه بصورت غیر مستقیم نسبت به آن تعریف می شوند.
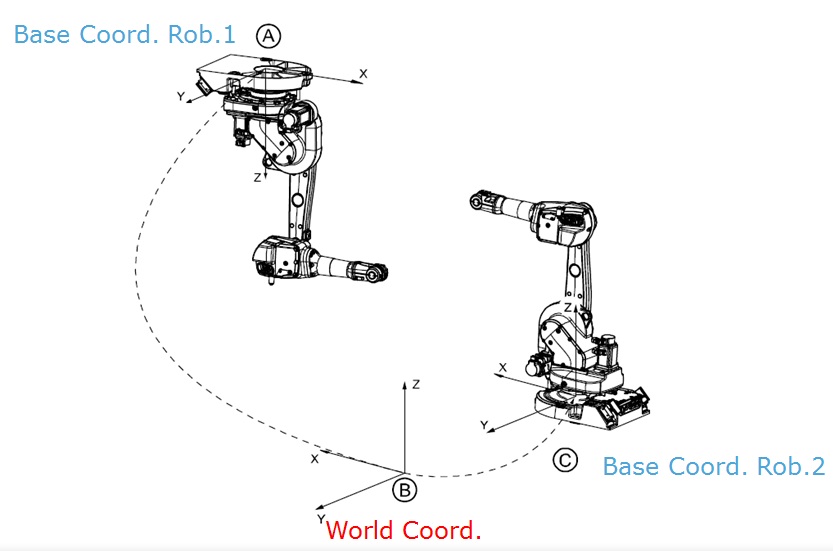
مرجع دستگاه مختصات جهانی بصورت یک نقطه داخل سلول یا فضای کاری ربات در نظر گرفته می شود و موقعیت ربات یا رباتها نسبت به آن نقطه مرجع که خود دستگاه مختصات جهانی را شکل می دهد، سنجیده میشود. بصورت پیش فرض مبدأ دستگاه مختصات جهانی بر دستگاه مختصات بیس منطبق است و اگر دستگاه مختصات جهانی بطور خاص تعریف نشود، این دستگاه مختصات بر دستگاه مختصات پایه منطبق خواهد شد. مشابه حالت قبل در این حالت، با ایستادن در مقابل ربات و حرکت ربات بصورت دستی، میتوان با کشیدن اهرم گردان تیچ پندنت به سمت بالا و پایین، ربات را در راستای محور Xها، با حرکت دادن اهرم گردان به طرفین آنرا در راستای محور Y ها و با چرخاندن اهرم گردان، ربات را در راستای محور Z ها جابجا نمود.
۳- دستگاه مختصات کاربر (به انگلیسی : User Coordinate System)
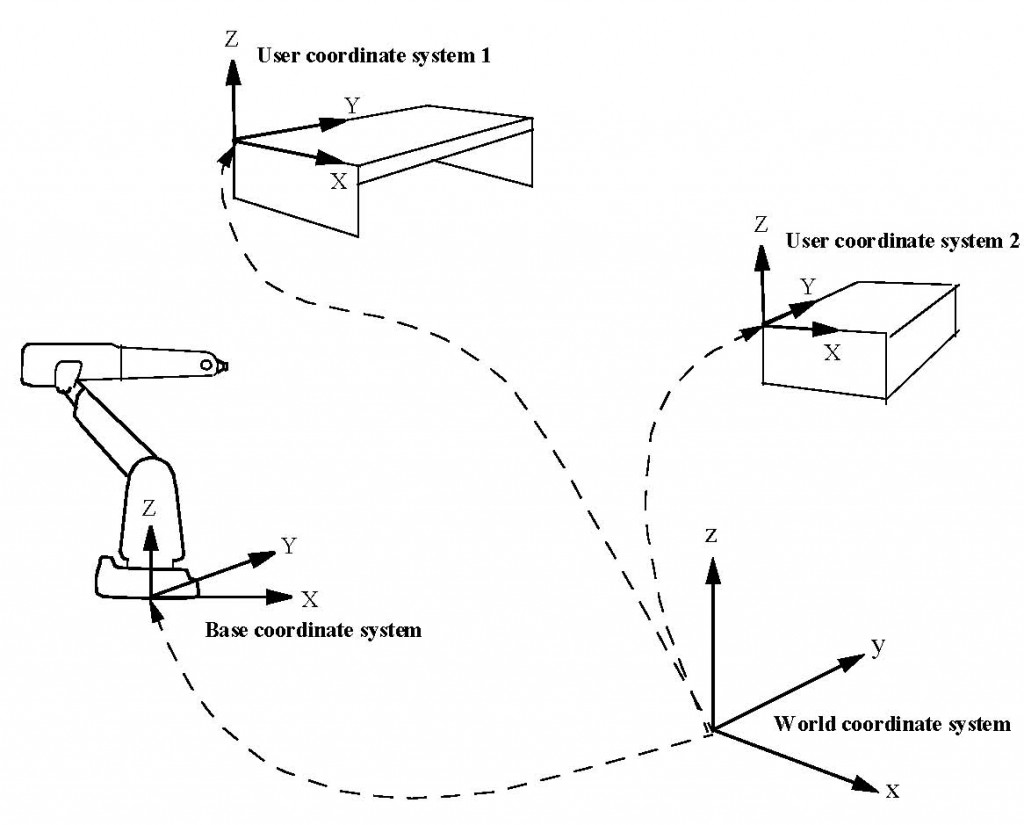
دستگاه مختصات کاربر، یک دستگاه مختصات کاملاً سفارشی شده برای کاربر می باشد که برنامه نویس بسته به نحوه قرار گیری اشیاء در محیط کار می تواند آن را به صُور مختلف تعریف نماید. فرض کنید یک ربات صنعتی روی قطعه ای مشخص که روی یک فیکسچر قرار دارد عملیات معینی را انجام می دهد. اگر برنامه نویس برای فیکسچر، یک دستگاه مختصات کاربر تعریف نماید و در این دستگاه مختصات، مسیر حرکتی ربات و فعالیت های مورد نیاز جهت انجام روی قطعه را برنامه نویسی نماید و بنا به دلایلی، نیاز به جابجایی یا چرخش فیکسچر به میزان مشخصی باشد تنها با جابجایی یا چرخش دستگاه مختصات کاربر به میزان اعمال شده روی فیکسچر میتوان بدون نیاز به برنامه نویسی مجدد، به سادگی برنامه ربات را اصلاح نمود. اهمیت این امر زمانی بیشتر آشکار می شود که این اصلاح در خصوص یک سلول رباتیک با چندین ربات انجام شود و به سادگی با اعمال تغییرات در دستگاه مختصات کاربر، موقعیت تمامی برنامه ها بر وضعیت جدید منطبق گردد. لازم به ذکر است که دستگاه مختصات کاربر بر پایه دستگاه مختصات جهانی تعریف می شود.
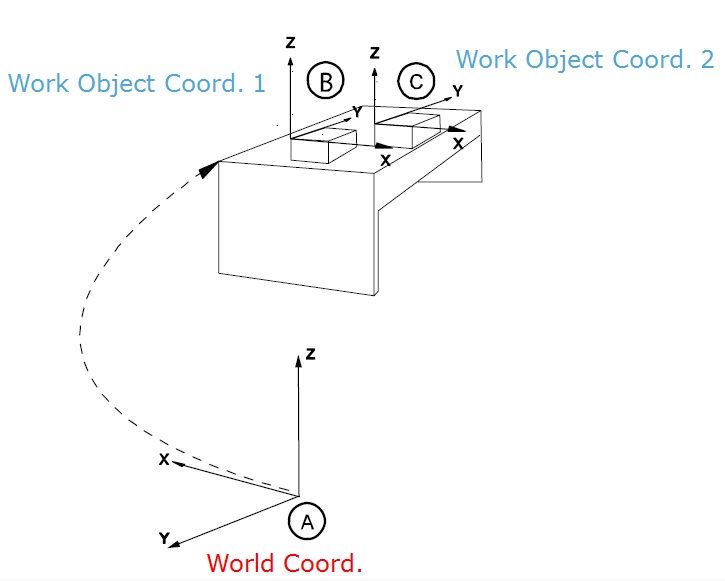
۴- دستگاه مختصات قطعه کار (به انگلیسی : Work Object Coordinate System)
همانگونه که بیان گردید دستگاه مختصات کاربر برای یک میز کار یا فیکسچر تعریف می شود و برنامه حرکتی ربات جهت انجام فعالیت های مربوطه روی آن میز کار در این دستگاه مختصات تعریف می شود. حال در صورت جابجایی یا چرخش میز کار یا فیکسچر، با اعمال تغییرات به همان اندازه روی دستگاه مختصات کاربر، برنامه بر شرایط جدید منطبق می گردد. تعریف این دستگاه مختصات، روش سودمندی است اما اگر بجای میز کار یا فیکسچر، این بار قطعه کار جابجا یا چرخانده شود از دستگاه مختصات قطعه کار با روال مشابه حالت قبل استفاده خواهد شد که بسیار کاربردی تر از دستگاه مختصات کاربر است. دلیل این امر آن است که زمانیکه قطعه جابجا می شود و یا قطعه مشابهی با قطعه قبلی در یک موقعیت جدید قرار می گیرد با این روش، برنامه نویسی ساده تر خواهد شد. چنین دستگاه مختصاتی که مرجع آن قطعه کار است دستگاه مختصات قطعه کار نامیده می شود. این دستگاه مختصات همچنین برای برنامه نویسی آف لاین بسیار مناسب است چرا که در تعریف تراژکتوری حرکت ربات میتوان مستقیماً از اطلاعات طراحی قطعه کار استفاده نمود.
این دستگاه مختصات میتواند بصورت ترکیبی با دستگاه مختصات کاربر نیز مورد استفاده قرار گیرد و در صورت جابجایی یا چرخش میز کار یا قطعه کار، با اعمال تغییرات روی دستگاه مختصات مربوطه، برنامه به سادگی و به سرعت بر شرایط جدید منطبق گردد. بطور خلاصه استفاده از دستگاه مختصات کاربر، مزایای ذیل را به همراه دارد :
– در هنگام تغییر موقعیت قطعه کار در ایستگاه ، تنها کافی است موقعیت دستگاه مختصات قطعه کار تغییر داده شود تا تمام مسیر ها و تارگت ها یکباره بروز شوند.
– از آنجا که هم قطعه کار و هم مسیرش قابل جابجایی است، امکان کار بر روی محورهای خارجی یا مسیرهای کانوایر فراهم می گردد.
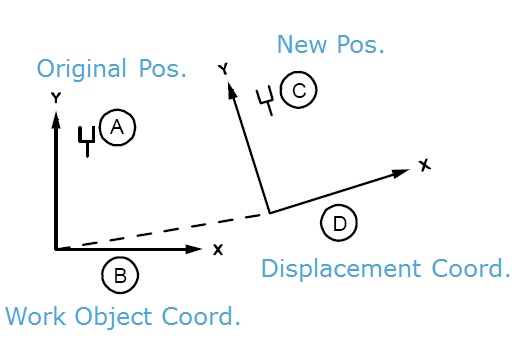
۵- دستگاه مختصات جابجایی (به انگلیسی : Displacement Coordinate System)
این دستگاه مختصات حالت خاصی از دستگاه مختصات نقطه کار به شمار می رود و کاربرد آن زمانی است که مسیر یکسانی می بایست روی چندین قطعه یکسان طی شود و فعالیت مشخصی روی آن ها صورت پذیرد. در اینگونه موارد، این تراژکتوری روی یک دستگاه مختصات بنام دستگاه مختصات جابجایی تعریف می شود و سپس با جابجا نمودن آن به اندازه میزان اختلاف قطعات، همان مسیر تکرار می گردد و نیازی به برنامه نویسی مجدد نمی باشد. بطور خلاصه، در این گونه موارد بجای چندین بار برنامه نویسی می توان موقعیت دستگاه مختصات نقطه کار را جابجا نمود.
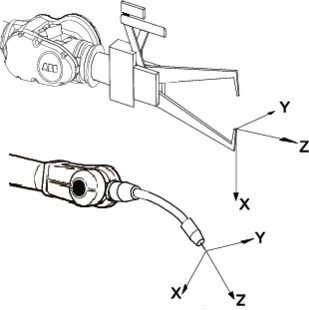
۶- دستگاه مختصات ابزار (به انگلیسی : Tool Coordinate System)
به منظور بهره برداری از یک ربات صنعتی در کاربردهای مختلف، از ابزار متفاوتی استفاده می شود. از آنجا که موقعیت و نحوه حرکت ابزار در انجام کاربرد مورد نظر از اهمیت خاصی برخوردار است، دستگاه مختصاتی به همین نام تعریف شده است. دستگاه مختصات ابزار که مرجع آن نقطه ای روی ابزار به نام نقطه مرکزی ابزار (به انگلیسی : (Tool Centre Point (TCP) است امکان هدایت و کنترل حرکت ربات متناظر با ابزار را فراهم می نماید. به بیان ساده تر، TCP، نقطه ای روی ابزار قابل نصب روی ربات است که با حرکت دادن آن روی یک مسیر مشخص، کاربرد مورد نظر با آن ابزار محقق می گردد. به عنوان مثال، در کاربردهای صنعتی به منظور برداشتن یک قطعه از یک مکان مشخص و انتقال آن به یک موقعیت جدید از ابزاری بنام گریپر (به انگلیسی : Tool Changer) استفاده می شود. شکل ظاهری و ابعاد و اندازه گریپر متناسب با مشخصات ظاهری و فیزیکی آن قطعه طراحی می گردد. حال اگر مرکز ثقل گریپر به عنوان TCP آن تعریف شود، با حرکت این نقطه روی یک مسیر مشخص طبق سرعت تعریف شده، میتوان قطعه را از یک موقعیت به موقعیت دیگری منتقل نمود. در برخی از کاربردهای صنعتی، رباتها به منظور انجام فعالیت های تعریف شده، نیازمند تغییر ابزار کاری خود می باشند که این امر میتواند توسط اپراتور در پایان یک سیکل کاری یا توسط خود ربات در حین فرآیند صورت پذیرد. رباتهایی که قادر به تغییر ابزار کاری خود می باشند اصطلاحاً رباتهای ابزار متغیر (به انگلیسی : Tool Changer) نامیده می شوند. بدیهی است که مختصات نقطه مرکزی ابزار برای ابزارهای مختلف متفاوت است و لذا در صورتیکه با تغییر ابزار، TCP ربات تغییر نکند، عملکرد ربات دچار اشکال خواهد شد و لازم است با تغییر ابزار، مختصات TCP نیز تغییر کند. ذکر این نکته لازم است که برای هر ربات صنعتی میتوان چندین TCP تعریف نمود، اما در هر لحظه از زمان تنها یکی از آنها فعال خواهد بود.
پس بطور خلاصه، دستگاه مختصات ابزار که مبدأ آن در مرکز ابزار قرار دارد، موقعیت ابزاری که ربات از آن استفاده می نماید را در طول اجرای برنامه تعریف می کند و بدین ترتیب، موقعیت و میزان چرخش ابزار مشخص می گردد. تمامی ربات ها دارای TCP از پیش تعریف شده ای بنام tool 0 می باشند. سایر TCP ها به صورت آفست به این مقدار مرجع اضافه می شوند.