یک ربات صنعتی از دو بخش بازوی مکانیکی (منیپولیتور) و کنترلر تشکیل شده است. منیپولیتورها انواع مختلفی دارند و از جهات متفاوتی دسته بندی می شوند، به عنوان مثال، منیپولیتورها از لحاظ طراحی مکانیکی به منیپولیتورهای بند بند، اسکارا، موازی، قطبی و کارتزین، از لحاظ قابلیت جابجایی به دو دسته منیپولیتورهای با پایه ثابت و با پایه متحرک، از لحاظ کاربرد به منیپولیتور رباتهای جوشکار، رباتهای پاشش رنگ، رباتهای جابجاکننده قطعات و… دسته بندی می شوند. شرکت ABB به عنوان یکی از بزرگترین تولید کنندگان ربات های صنعتی در جهان، انواع مختلفی از منیپولیتورها را بسته به کاربردهای مختلف طراحی و تولید می نماید. لیست کامل ربات های این شرکت را میتوانید از اینجا مشاهده نمائید. با توجه به محصولات فعلی شرکت ABB، میتوان دریافت که بخش قابل توجهی از محصولات این شرکت به ربات های با منیپولیتور بند بند(Articulated) اختصاص دارد. این دسته از ربات ها، بیشترین کاربرد را در صنایع به خود اختصاص داده اند. ربات های با منیپولیتور بند بند شرکت ABB بسته به میزان بار قابل جابجایی، میزان سطح دسترسی، وزن و ابعاد ربات، کاربرد مربوطه و… از ربات کوچک IRB120 تا ربات صنعتی IRB8700 گسترده شده اند. از این ربات ها میتوان در کاربردهای مختلف همچون فرآیند جوشکاری قطعات خصوصاً در صنایع خودروسازی، جابجایی قطعات در فرایندهای مختلف همچون خطوط تولید پرس رباتیک و… استفاده نمود.

ربات های پاشش رنگ به جهت کارکردن در محیطهای قابل اشتعال و قابل انفجار و همچنین استفاده از تجهیزات و اپلیکیتورهای پیشرفته پاشش رنگ، دسته جداگانه ای از ربات های صنعتی این شرکت را به خود اختصاص داده اند و بسته به کاربرد، انواع طراحی منیپولیتورها از منیپولیتورهای بند بند تا اسکارا و کارتزین در آن وجود دارد. یک نمونه ربات پاشش رنگ از مدل IRB5400 که از ربات های قدیمی شرکت ABB نیز به شمار می رود در شکل زیر نشان داده شده است.

ABB مفتخر به تولید ربات موازی IRB360 با قابلیت جابجایی قطعات تا وزن ۸ کیلوگرم می باشد که در نوع خود کم نظیر است. این شرکت همچنین، اولین تولید کننده ربات دو بازوی جهان به نام YUMI است که تحولی عظیم در دنیای رباتیک به شمار می رود.

تاکنون پنج نسل از کنترلر های ربات های ABB به بازار عرضه شده است که به ترتیب عبارت است از S3 ،S2 ،S1، خانواده S4 (شامل S4، S4C، S4P، S4CPlus و S4PPlus) و خانواده IRC5 شامل IRC5C ، RC5P و IRC5 PMC. در حال حاضر در بازار ربات های استوک و کارکرده ربات های از نسل چهارم به بعد شرکت ABB موجود می باشد، گرچه کنترلرهای S4 کمتر از بقیه در بازار موجود است و عمدتاً کنترلرهای S4C/P و S4C/P Plus به چشم می خورد. یک نمونه کنترلر نسل پنجم IRC5 در شکل زیر نشان داده شده است.

بطور کلی کنترلر ربات های ABB، شامل : کابین کنترلر، تیچ پندنت (به انگلیسی : Teach Pendant (TPU)) در نسل چهارم و فلکس پندنت (به انگلیسی : Flex Pendant) در نسل پنجم و پنل اپراتوری می باشد که پنل اپراتوری در بسیاری از مدلها روی خود کنترلر قرار گرفته است. کابین کنترلر از دو بخش اصلی سیستم کامپیوتر و سیستم سروو و تغذیه تشکیل شده است که در مدلهای دوآل (به انگلیسی : Dual)، این دو بخش در دو کابین مجزا قرار می گیرند. بجز برد اندازه گیری سریال (به انگلیسی : (Serial Measuring Board (SMB) که وظیفه جمع آوری اطلاعات مربوط به موقعیت محورها (اطلاعات رزولورها) و ارسال آن به کنترلر را بر عهده دارد و روی منیپولیتور واقع شده است مابقی بردها و مدارات کنترلی داخل کنترلر قرار گرفته اند. اطلاعات برد SMB به هنگام قطع برق توسط باتری های پشتیبان محافظت می شود. بخش کنترل از بردهای الکترونیکی و قطعات ذیل تشکیل شده است:
– برد کامپیوتر اصلی (به انگلیسی : Main Computer Board)
این برد وظیفه کنترل تمام سیستم ربات را با استفاده از بخشی از حافظه RAM برعهده دارد. در واقع این برد، به منزله یک کامپیوتر است که سیستم عامل مربوط به ربات روی آن نصب و بوت می شود. سپس کاربر میتواند برنامه نوشته شده برای ربات را روی آن اجرا نماید. با اجرای برنامه، ربات قادر خواهد بود طبق یک تراژکتوری معین حرکت نماید.
– برد کامپیوتر ربات (به انگلیسی : Robot Computer Board)
این برد وظیفه کنترل منیپولیتور ربات و ارتباط ورودی ها و خروجیها را برعهده دارد و خود از کامپیوتر محورها (به انگلیسی : Axis Computer) به عنوان تنظیم کننده سرعت محورها و کامپیوتر ورودی-خروجیها (به انگلیسی : I/O Computer) به عنوان برقرارکننده ارتباط کنترلر با دنیای خارج تشکیل شده است. به عبارت دیگر، این برد از یکسو وظیفه ارسال و دریافت اطلاعات مابین ربات و دنیای پیرامون آن را برعهده دارد و از این طریق اینترلاک های ربات با تجهیزات دیگر برقرار می شود و از سوی دیگر، با استفاده از اطلاعات دریافتی از برد کامپیوتر اصلی، ماژولهای درایو محورهای ربات را کنترل می نماید و از این طریق، بهترین مسیر حرکتی مابین دو نقطه در تراژکتوری ربات معین می گردد.
– برد حافظه (به انگلیسی : Memory Board)
این برد به منزله یک کارت حافظه جانبی برای افزایش میزان حافظه RAM می باشد و در سایزهای مختلف بسته به نوع کنترلر موجود است. اطلاعات حافظه RAM به هنگام قطع تغذیه کنترلر توسط باتری های لیتیومی محافظت می شوند. در صورت خالی شدن باتریها با قطع برق، کلیه اطلاعات ربات پاک گردیده و به منظور استفاده مجدد، میبایست ابتدا ربات بوت گردد، سپس کالیبره شده و برنامه کاربر روی حافظه ریخته شود. بوت کردن ربات در مدلهای قدیمی از درایو فلاپی درایو و در مدلهای جدید از طریق حافظه FLASH USB انجام می شود.
– برد سیستمی (به انگلیسی : System Board)
این برد وظیفه جمع آوری و هماهنگ نمودن کلیه سیگنالهایی که بر عملکرد ربات و ایمنی پرسنل تأثیرگذار است را برعهده دارد. در صورت فراهم نشدن شرایط ایمنی، LED مربوطه روی این برد روشن گردیده و تا رفع مشکل موجود، امکان راه اندازی ربات وجود نخواهد داشت.
– بردهای ورودی – خروجی (به انگلیسی : I/O Board)
این بردها وظیفه برقراری سیگنالهای ورودی- خروجی از تجهیزات دنیای خارج از کنترلر را با کنترلر بر عهده دارند. به بیانی دیگر به منظور برقراری ارتباط سخت افزاری تجهیزات مختلف بصورت سیمی با کنترلر، از بردهای I/O استفاده می شود که دارای مدلهای مختلفی می باشند. در مدلهای جدیدتر معمولاً از بردهای شبکه استفاده می گردد که تبادل اطلاعات مابین تجهیزات را از طریق شبکه های صنعتی مختلف با کنترلر فراهم می نمایند.
ارتباط مابین بردهای فوق که در شکل زیر نشان داده شده است از طریق یک برد مادر برقرار می گردد. توجه داشته باشید که مجموعه بردهای ذیل، سیستم کامپیوتر ربات را شکل میدهند که وظیفه ایجاد، اجرا و ذخیره سازی برنامه ربات را برعهده داشته و میتواند حرکت محورهای ربات را هماهنگ و تنظیم نماید.

بخش دوم کنترلر، سیستم سرووی کنترلر است که شامل چندین بخش متعامل و متفاوت است و وظیفه تنظیم موقعیت و سرعت حرکت محورهای ربات، همچنین سنکرون نمودن عملکرد موتورهای ربات را بر عهده دارند. از مهمترین اجزاء بخش سرووی ربات میتوان به ماژول های درایو ربات، منابع تغذیه و ترانسفورماتورها، مدارات حفاظتی و… اشاره نمود. در حین اجرای برنامه، اطلاعات مربوط به موقعیت محورهای ربات بطور پیوسته از برد SMB دریافت می شود. این اطلاعات وارد تنظیم کننده موقعیت گردیده و با مقادیر قبلی موقعیت مقایسه می گردد. نتیجه این عمل، مراجع جدید موقعیت و سرعت برای محورهای ربات می باشد. ذکر این نکته نیز لازم است که سیستم دارای یک مدل دینامیکی از ربات است که بطور پیوسته پارامترهای مدل را بسته به مقادیر اینرسی، گرانش و تقابل مابین محورها محاسبه می نماید. شمای کلی عملکرد سیستم های فوق در شکل زیر نشان داده شده است. ضمناً موتورهای ربات به سنسورهای PTC مجهز شده اند تا در مقابل اضافه بار و دمای بیش از حد محافظت گردند. در صورتیکه سنسور، دمای بیش از حد را برای موتورها قرائت نماید، برد کامپیوتر ربات وضعیت را بررسی و در صورت لزوم موتورها را خاموش می نماید.

همانگونه که بیان گردید تیچ پندنت یا فلکس پندنت از متعلقات اصلی کنترلر رباتهای شرکت ABB می باشد که این کامپیوتر کوچک از طریق یک کابل به کابین کنترلر اصلی ربات متصل می شود. این وسیلهِ اپراتوریِ دستی، از قابلیت های زیادی از جمله کنترل ربات بصورت دستی، مشاهده کلیه آلارمها و خطاهای ربات، مشاهده وضعیت ورودیها و خروجیهای کنترلر، امکان اجرای خط به خط برنامه و اصلاح آن در صورت لزوم ، تیچ نمودن ربات و بسیاری امکانات دیگر برخوردار است. در شکل زیر یک نمونه تیچ پندنت و یک نمونه فلکس پندنت نشان داده شده است.

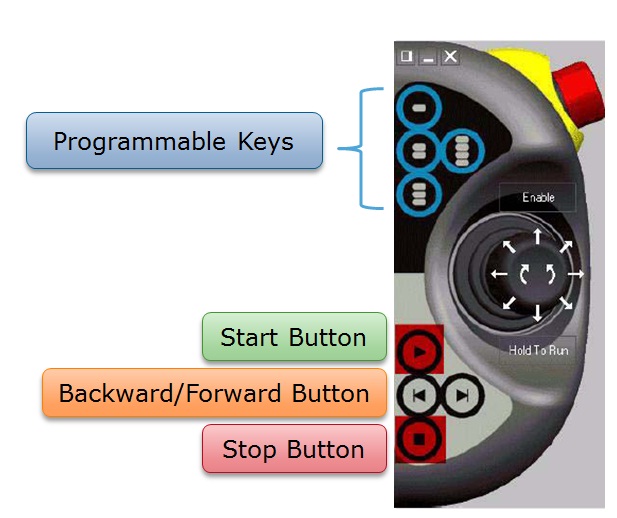
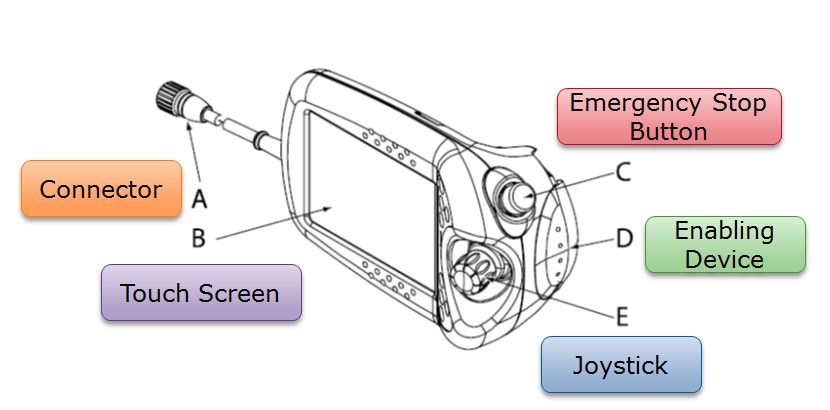
فلکس پندنت و TPU به گونه ای ساخته شده اند تا در شرایط سخت محیط های صنعتی، بخوبی مقاوم باشند. لازم به ذکر است که در صورت عدم وجود این تجهیز، ربات قادر به حرکت نمی باشد. کانکتور (جهت اتصال به کنترلر اصلی)، صفحه لمسی، دکمه توقف اضطراری، دکمه فعال ساز دستگاه و اهرم گردان، اجزای اصلی فلکس پندنت می باشند. از دیگر دکمه های روی فلکس پندنت میتوان به چهار دکمه قابل برنامه ریزی توسط کاربر، دکمه استارت (آغاز سیکل جاری برنامه)، دکمه استاپ (توقف سریع ربات) و دکمه های اجرای یک دستورالعمل در برنامه به سمت جلو و عقب اشاره نمود. فلکس پندنت در مقایسه با TPU، دارای دکمه های به مراتب کمتری است و دلیل آن به صفحه لمسی فلکس پندنت باز می گردد که سبب شده است بسیاری از دکمه ها حذف و گزینه های مربوطه از طریق صفحه لمسی قابل دسترس باشند.
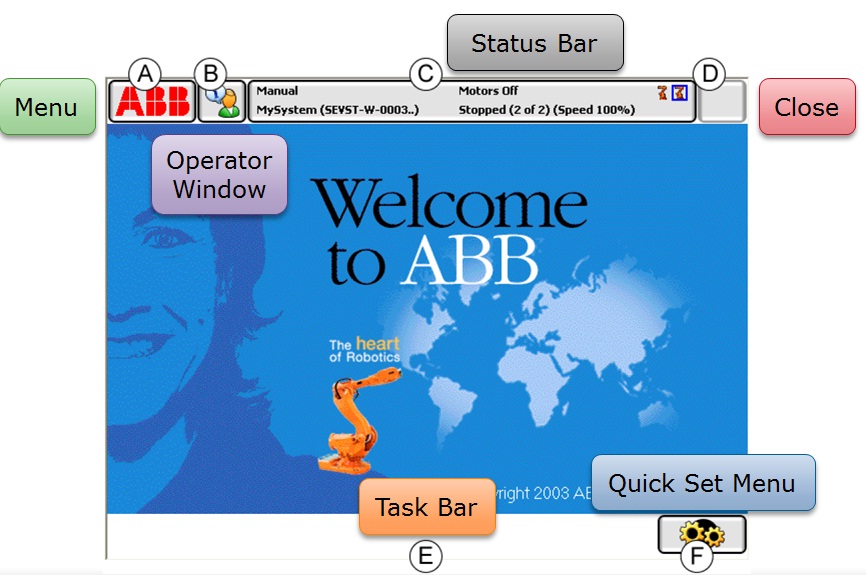
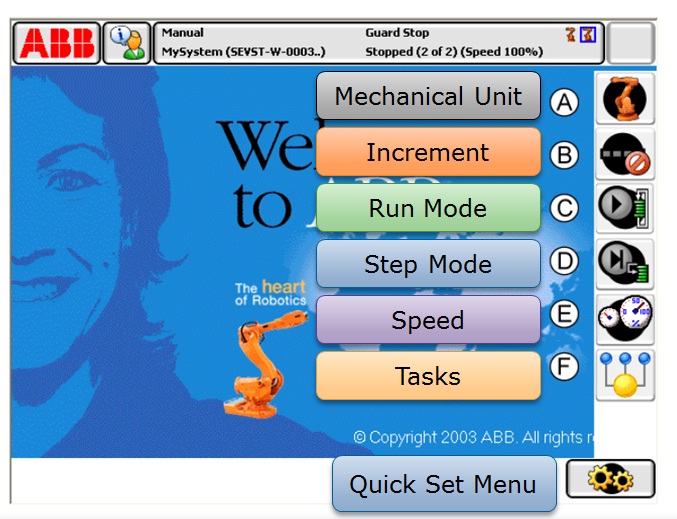
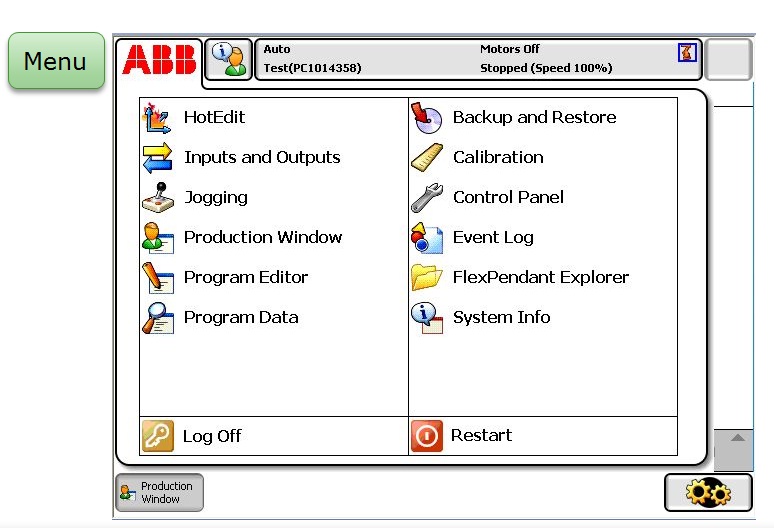
المان های اصلی صفحه نمایشگر فلکس پندنت در شکل زیر نشان داده شده اند. منوی ABB مشابه دکمه استارت ویندوز در کامپیوتر، پنجره ای امکانات و قسمت های قابل دسترسی را به کاربر پیشکش می نماید. پنجره اپراتوری، پیام های نوشته شده در برنامه ربات را نشان می دهد. این پیام ها معمولاً زمانیکه نیاز به تأیید کاربر به منظور ادامه برنامه می باشد نشان داده می شود. با گزینه Clear تمام پیام ها حذف می شود و با گزینه Don’t Show Logs، پیام های مخفی می گردند. نوار وضعیت، اطلاعات مهم درباره وضعیت سیستم مانند مد بهره برداری، نام سیستم (و نام کنترلر)، وضعیت روشن یا خاموش بودن موتورها، وضعیت برنامه و واحد مکانیکی فعال و غیرفعال را نشان میدهد. دکمه Close و نوار وظیفه (Task Bar) عملکردی مشابه ویندوز دارند و به ترتیب به منظور بستن پنجره ها و نمایش کلیه پنجره های باز شده به کار می روند. منوی دسترسی سریع نیز به منظور دسترسی سریع تنظیمات به گزینه های پرکاربرد درنظرگرفته شده و با فشردن آن، گزینه های مربوطه نمایش داده می شود. در شکل های زیر، این گزینه ها نشان داده شده است.
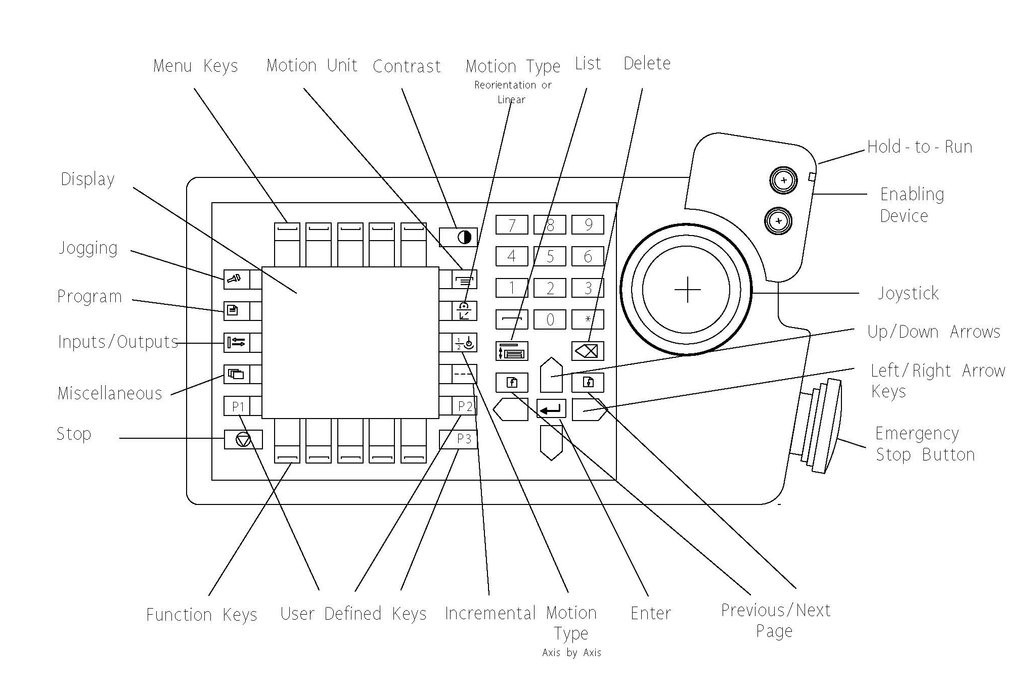
در تیچ پندنت، تقریباً اکثر موارد فوق وجود دارد ولی دسترسی به آنها از طریق دکمه های تعبیه شده روی TPU امکان پذیر است. در شکل زیر، فانکشن کلیه کلیدهای روی TPU نشان داده شده است.