
سیستمهای کنترل حرکت و درایو (Motion Control System And Drives)
امروزه در اکثر کاربردهای صنعتی، از موتورهای الکتریکی استفاده میگردد. این موتورها ممکن است بهصورت الکتروپمپ یا الکتروفن مورداستفاده قرار گیرند یا اینکه بخشی از یک سیستم مکانیکی دیگر مانند کانوایر یا همزن باشند. در برخی از این کاربردها، سرعت نهایی سیستم از طریق طراحی اجزاء مکانیکی همچون چرخدندهها و اینرسی بار متصل به شفت موتور تعیین میشود اما در اکثر کاربردها، لازم است تا سرعت سیستم از طریق سرعت موتور کنترل گردد. سرعت موتور را میتوان به روشهای گوناگونی کنترل نمود. آخرین فنّاوری در زمینه تغییر سرعت موتورهای الکتریکی، استفاده از فنّاوری درایوهای الکتریکی میباشد. بهطورکلی درایوهایی که برای کنترل سرعت موتورهای DC بکار میروند، مبدلها (به انگلیسی : Converters) یا درایوهای DC، درایوهایی که برای کنترل سرعت موتورهای AC بکار میروند، درایوهای AC و درایوهایی که برای کنترل سرو موتورها مورداستفاده قرار میگیرند، سرو درایو (به انگلیسی : Servo Drives) نامیده میشوند.
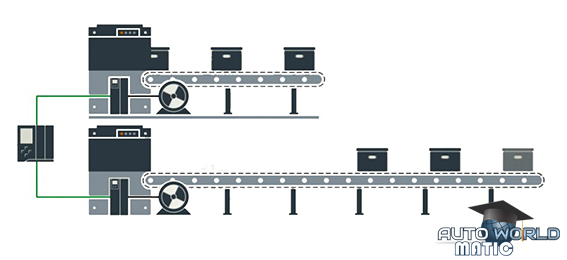
در کنار کاربردهای کنترل سرعت، کاربردهای کنترل حرکت به کاربردهایی اشاره دارند که در آن به کنترل بخشهای متحرک ماشینآلات و تجهیزات پرداخته میشود. دستیابی به حرکت کنترلشده و دقیق بخشهای متحرک ماشینآلات و تجهیزات به دو شکل موقعیتیابی (به انگلیسی : Positioning) و انطباق (به انگلیسی : Synchronism)، اهداف اصلی سیستمهای کنترل حرکت به شمار میرود. منظور از موقعیتیابی، جابجایی یک شئی از یک نقطه به نقطه دیگر است که خود به دو صورت موقعیتیابی مطلق و موقعیتیابی نسبی امکانپذیر میباشد. در موقعیتیابی مطلق، شئی میبایست به موقعیت معینی در راستای طول نسبت به نقطه مبدأ منتقل شود اما در موقعیتیابی نسبی، شئی میبایست به میزان معینی نسبت به نقطه فعلی منتقل گردد. شکل دوم کاربردهای کنترل حرکت بهصورت انطباق میباشد. منظور از انطباق، جابجایی یک شئی بهصورت سنکرون و هماهنگ با شئی دیگری است. انطباق نیز به سه دسته انطباق خطی، انطباق غیرخطی و انطباق دو یا سهبعدی تقسیمبندی میشود. کنترل سرعت خطوط انتقال و کانوایرها، کنترل سرعت پمپهای دوار و کنترل سرعت همزنها بهعنوان نمونههایی از کاربردهای کنترل سرعت و یک نمونه کاربرد کنترل حرکت بهصورت انطباق خطی دو خط کانوایر در شکل های زیر بهصورت شماتیک نشان دادهشده است.

امروزه استفاده از کاربردهای کنترل حرکت در صنایع مختلف رو به گسترش است و تقریباً در اکثر صنایع، نمونههایی از کاربردهای کنترل حرکت بهصورت سیستمهای حلقه باز و سیستمهای حلقه بسته به چشم میخورد. تفاوت اصلی سیستمهای حلقه باز با سیستمهای حلقه بسته در آن است که در حالت نخست، کنترلر فرامین لازم جهت نیل به حرکت مدنظر را از طریق تجهیزات واسط به محرک ارسال مینماید و اطلاعی از موقعیت و حرکت نهایی محرک نداشته و فیدبکی از آن دریافت نمینماید، حالآنکه در سیستمهای حلقه بسته، موقعیت دقیق محرک در هرلحظه از زمان توسط وسایل اندازهگیری سنجیده و به کنترلر ارسال میگردد و بدین ترتیب کنترلر میتواند میزان خطای موجود را در هرلحظه از زمان شناسایی و برطرف نماید. کنترل دقیق حرکت محورهای رباتهای صنعتی و دستگاههای CNC با استفاده از سرو موتورها، سنسورها و سیستمهای اندازهگیری دقیق موقعیت همچون رزولورها (به انگلیسی : Resolvers) و انکدرها (به انگلیسی : Encoders)، نمونههایی از کاربردهای متداول کنترل حرکت در صنایع مختلف میباشند.