

همانطور که در مطالب پیشین بیان گردید، امروزه استفاده از برنامه کنترل پایداری (ESC) و افزونه های مرتبط با آن در خودرو، در بسیاری از کشورها جزء استانداردهای اجباری محسوب می شود. نقش موثر این سامانه در کاهش تصادفات سبب شده است که در سالهای اخیر این سامانه های ایمنی، راه خود را به دنیای موتورسیکلتها نیز پیدا کنند. باید توجه گردد که یک اتومبیل میتواند در دو بعد طولی و عرضی خود جابجایی داشته باشد ولی یک موتورسیکلت گزینههای بیشتری در پیش رو دارد؛ این وسیله نقلیه میتواند به طرفین خم شود و بپیچد یا آنکه روی چرخ جلو یا عقب تکچرخ بزند. همچنین ترمزهای موتورسیکلت بهصورت جداگانه کنترل میشوند. کنترل ترمز چرخ جلو بر روی فرمان است و پدال ترمز چرخ عقب نیز در زیر پای راست موتورسوار قرار میگیرد.
شرکت «بوش» به عنوان یکی از شرکت های پیشرو در ارائه سیستم های ایمنی، مدولاتور پیشرفته ترمز خود را برای کنترل پایداری موتورسیکلتها ارائه نموده است. این سامانه با استفاده از حسگرها، تفاوت سرعت بین چرخهای جلو و عقب را رصد میکند و هنگامی که یکی از چرخها کشش خود را از دست بدهد، وارد عمل میشود. ماژول اندازهگیری اینرسی (ژیرسکوپ) پنج جهته نیز وضعیت و زوایای خمشدن موتورسیکلت را تحتنظر دارد. دادههای مربوط به شتاب، ترمزگیری، تغییر جهت، لغزش، از دست دادن کشش، بلندشدن چرخ و سرعت نسبی چرخها جمعآوری شده و در هر ثانیه، صدها بار مورد پردازش قرار میگیرند. اگر هرگونه مشکلی وجود داشته باشد، سامانه بهکار میافتد. در تصویر زیر، اجزای مرتبط با این سامانه نشان داده شده است.
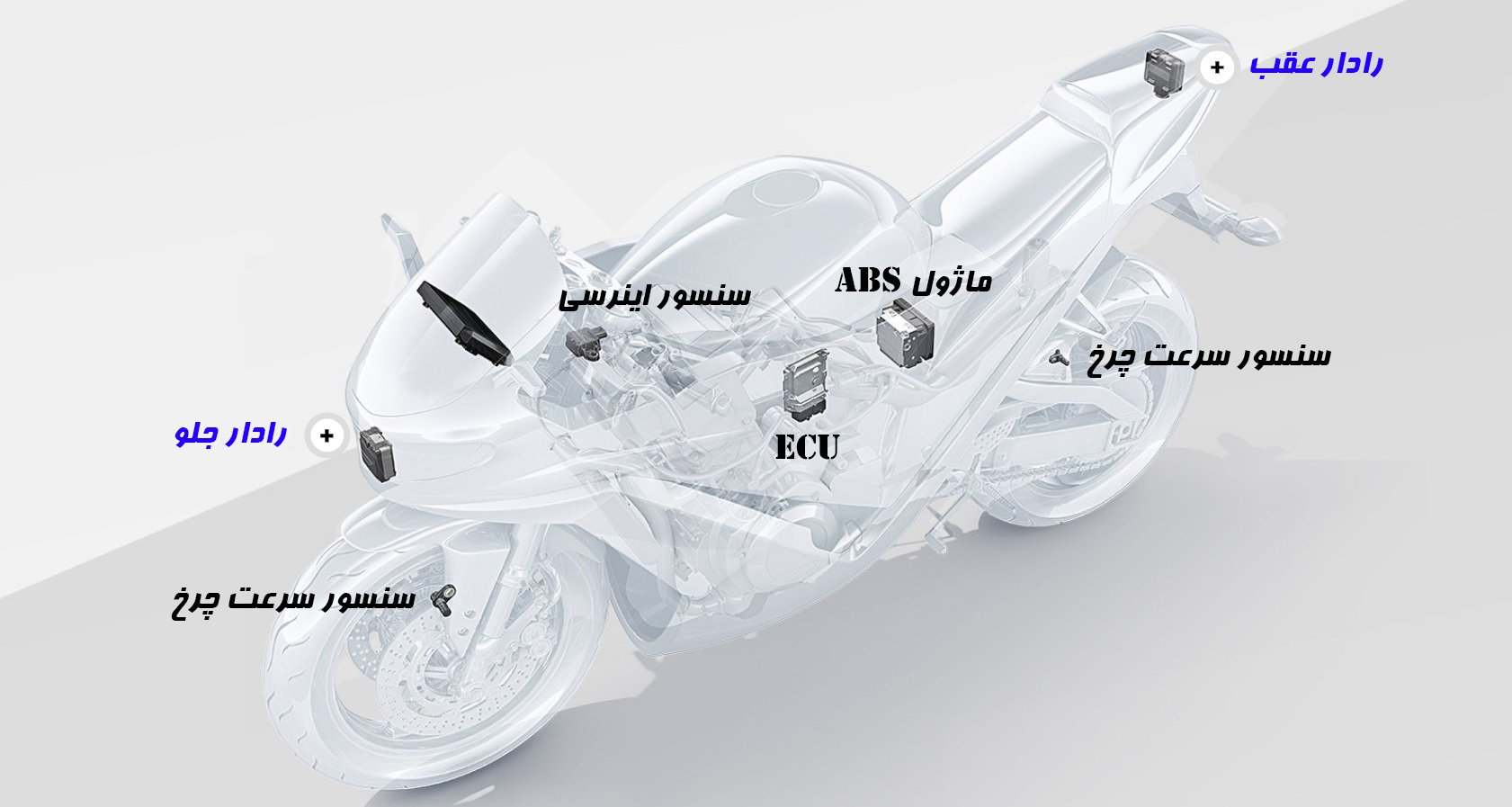
اگر راننده موتورسیکلت بیشتر از ظرفیت کشش به ترمزها نیرو وارد کند، این سیستم، جلوی فشار بیشتر را میگیرد و چسبندگی را حفظ میکند. در همین حال، این نیروی ترمز میتواند به چرخ بهینه منتقل شود. همچنین اگر چرخ عقب به علت گاز زیاد، در جای خود چرخش داشته باشد، سیستم از شدت نیروی ورودی خواهد کاست. سیستم کنترل پایداری موتور سیکلت (MSC) از موتورسوار در هنگام ترمزگیری، شتاب گیری و در هنگام رانندگی مستقیم یا در پیچ ها پشتیبانی می کند. در ویدیوی زیر چگونگی کارکرد این سامانه توضیح داده شده است.
سامانه کنترل پایداری موتورسیکلت (MSC)، به عنوان پایه و اساس پیاده سازی طیف گسترده ای از آپشنهای با ارزش افزوده برای افزایش ایمنی، راحتی و بهبود عملکرد موتورسیکلت به شمار میرود. آپشنهای کنترل کشش، کروز کنترل تطبیقی (ACC) و بطور کلی سیستم های پیشرفته دستیار موتور سوار (به انگلیسی : Advanced Rider Assistance Systems(ARAS)) با افزوده شدن سنسورها و سیستمهای دیگری به MSC شکل می گیرند. همانگونه که بیان شد سیستم کنترل پایداری موتور سیکلت از مجموعه ای از سنسورها برای ثبت وضعیت دینامیکی وسایل نقلیه دو چرخ استفاده می نماید. سنسورهای سرعت چرخ، سرعت چرخش چرخهای جلو و عقب را اندازهگیری میکنند و ماژول اندازهگیری اینرسی (ژیرسکوپ)، شتاب و سرعت زاویهای موتورسیکلت را 100 بار در ثانیه اندازهگیری میکند. MSC با تجزیه و تحلیل داده های سنسورها، اختلاف سرعت بین چرخ های جلو و عقب و همچنین وضعیت دینامیکی موتورسیکلت، ایمنی و پایداری بهتری را در موقعیت های مختلف سواری به ارمغان می آورد. حال با ترکیب این سیستم با یک واحد کنترل الکترونیکی (ECU) و تعدادی سنسور، امکان پیاده سازی سامانه های کنترلی بیشتری مهیا می گردد. در شکل زیر، مهمترین اجزای لازم برای پیاده سازی این سامانه های کنترلی پیشرفته نشان داده شده است.
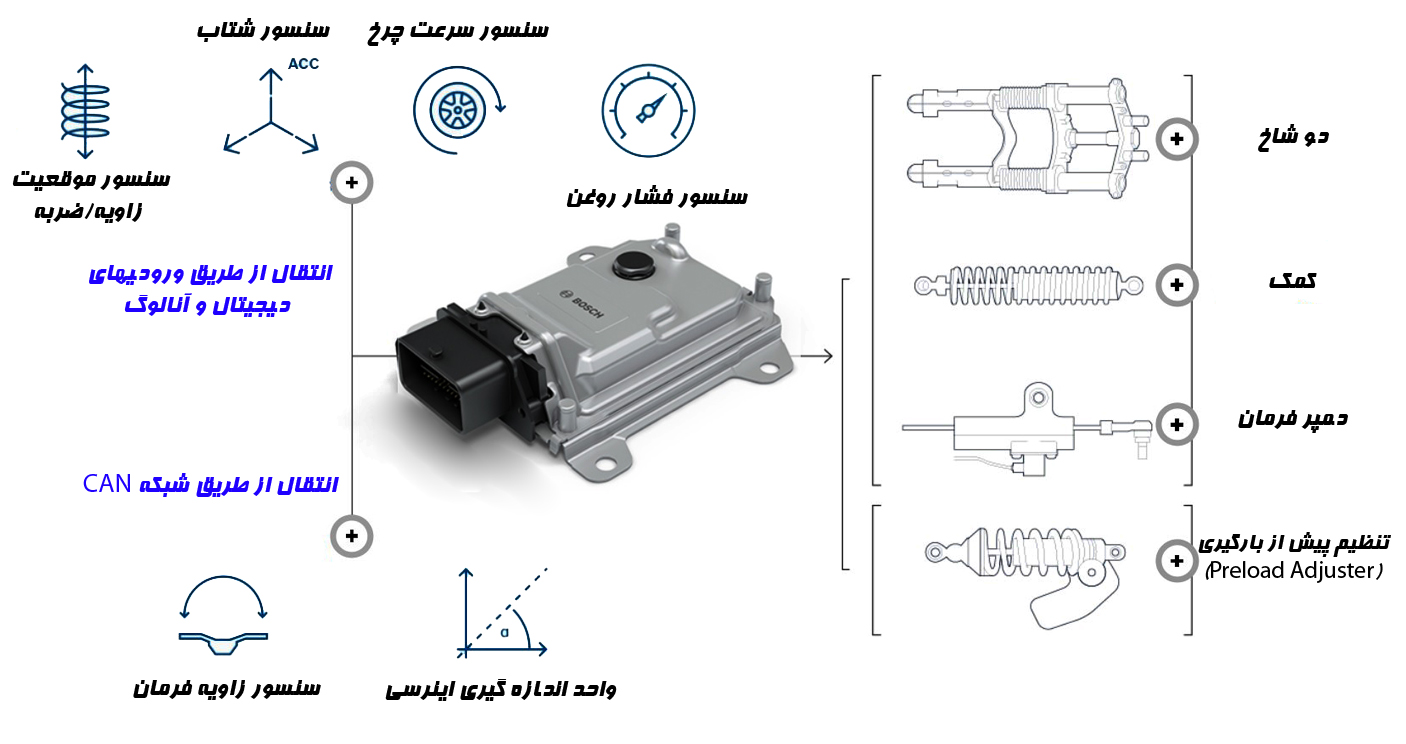
در ساختار فوق، واحدل کنترل یا ECU به عنوان هسته ای مرکزی با دریافت و پردازش داده ها دریافتی از مجموعه ای از سنسورها، عملگرها مختلف را تنظیم می کند تا ایمنی و راحتی سواری را بهبود بخشد. سنسورهای سرعت چرخ بصورت غیرتماسی، سرعت چرخش چرخ ها را محاسبه می کنند. سنسور فشار روغن که روی سیلندر اصلی ترمز نصب می شود، میزان نروی اعمالی از سمت راننده و میزان فشار ترمز را اندازه گیری می کند. سنسور شتاب که روی سیستم تعلیق نصب شده است، میزان شتاب عمودی را اندازه گیری می کند. سنسور موقعیت ضربه/زاویه برای تخمین موقعیت نهایی سیستم تعلیق استفاده می شود. سنسور زاویه فرمان، زاویه فرمان و سرعت دوران فرمان توسط راننده را تشخیص می دهد و واحد اندازه گیری اینرسی، سرعت و شتاب زاویه ای موتورسیکلت را 100 بار در ثانیه اندازه گیری می کند تا اطلاعاتی در مورد وضعیت دینامیکی فعلی آن به سامانه ارائه دهد. علاوه بر این موارد، این امکان برای موتورسوار پیشبینی می شود که با فشردن یک دکمه، ملاحضات خود را در اجزای مختلف سیستم تعلیق موتورسیکلت اعمال نماید. در ادامه برخی از سامانه های پیشرفته دستیار موتورسوار (ARAS) بصورت مختصر معرفی شده اند.
موتورسواری در بزرگراه پس از یک سواری طولانی نیاز به سطح بالایی از تمرکز و کنترل سرعت دارد. یکی از دلایل اصلی تصادفات موتورسیکلتها، برخورد با وسیله نقلیه جلویی به دلیل عدم فاصله مناسب است. برای کمک به راننده در این شرایط، سامانه کروز کنترل تطبیقی (ACC) ارائه شده است. سامانه ACC، با اضافه شدن رادارهایی در جلو و عقب وسیله نقلیه و بر پایه سامانه کنترل پایداری (MSC) شکل می گیرد. سامانه MSC، به طور مداوم وضعیت دینامیکی موتورسیکلت را به منظور کنترل شتاب یا کاهش سرعت برای ACC کنترل می کند و از سوارکار در حفظ فاصله ایمن از وسیله نقلیه جلویی پشتیبانی می کند.
سامانه هشداردهنده جلوگیری از برخورد به کمک رادارهای نصب شده در جلوی موتورسیکلت و همچنین سرعت و شتاب حرکت، بطور مستمر فاصله ایمن با وسیله نقلیه جلویی را محاسبه می کند. به مجرد کاهش فاصله از مقدار مجاز، هشدار صوتی و تصویری به موتورسوار اعلام میگردد. این پیام هشدار بسته به میزان فاصله از میزان شدت صدا و آلارم تغییر می کند. این سامانه را میتوان حالت دستی سامانه کروز کنترل تطبیقی (ACC) به شمار آورد.
سامانه تشخیص نقطه کور به کمک رادار نصب شده در عقب موتورسیکلت بطور مستمر وضعیت پشت را پایش می نماید. به محض تشخیص یک وسیله نقلیه در پشت موتورسیکلت یا در خط مجاور آن، به موتورسوار در خصوص تغییر خط هشدار (صوتی، تصویری) میدهد.
شروع به حرکت در یک سطح شیب دار به جهت ضرورت کار کردن سریع با پدال ترمز، اهرم دنده و گاز، کار دشواری است و عمدتاً منجر به حرکت ناخواسته به عقب موتورسیکلت میشود. سامانه HHC برای رفع این مشکل در سطوح شیبدار با شیب بیش از 5% ارائه شده است. این سامانه پس از آنکه موتورسوار، پدال ترمز را روی سطح شیبدار و در حالت سکون رها نماید، به طور خودکار ترمزها را تا پنج ثانیه بیشتر نگه می دارد. در این بازه زمانی موتورسوار فرصت کافی برای تغییر دنده و شروع به حرکت را بدون برگشتن به عقب دارد. گفتنی است واحد اندازه گیری اینرسی (ژیروسکوب)، تعیین می کند که آیا موتورسیکلت در سطح شیبدار و در حالت سکون قرار دارد یا خیر.
برای موتورسواران حرفه ای که قصد لذت بردن از سواری در مسیرهای شنی، خاکی و بطور کلی خارج از جاده را دارند، سامانه ترمز ضدقفل (ABS) یک مانع محسوب میشود و قدرت مانور در پیچهای خارج جاده ای را از موتورسوار می گیرد یا آنرا به شدت کاهش میدهد. برای این قبیل کاربردها، شرکتهایی همچون بوش، اقدام به طراحی و توسعه سامانه های ترمز ضدقفل و کنترل پایداری خاصی برای موتورسیکلت نموده اند.
جهت کسب اطلاعات بیشتر در خصوص سامانه های فوق و یا سایر سامانه های ARAS همچون Slope-dependent control، Rear-wheel slide control، Launch control، Cornering drag torque control و … میتوانید به سایت بوش مراجعه نمایید.