
تجهیزات اندازه گیری موقعیت و سرعت شفت
یکی از پارامترهای مهم در انتخاب یک ربات صنعتی، میزان دقت منیپولیتور ربات است، بدین معنا که ربات با چه میزان اختلاف (خطایی) نسبت به نقطه واقعی میتواند به نقطه تعریف شده در فضای سه بعدی دست یابد. بدیهی است که میزان دقت و کیفیت نوع تجهیز اندازه گیری بکار رفته در تعیین موقعیت محورهای منیپولیتور در این زمینه از اهمیت ویژه ای برخوردار است، لذا در این قسمت، ابتدا تجهیزات متداول اندازه گیری موقعیت و سرعت شفت یک موتور الکتریکی معرفی و در ادامه، تجهیزات مورداستفاده در سیستم های موقعیت یابی رباتهای صنعتی با جزئیات بیشتری تشریح می گردد.

بطور کلی سرعت و موقعیت شفت یک موتور الکتریکی را میتوان با سه تجهیز زیر اندازه گیری نمود:
– تاکو ژنراتور (به انگلیسی : TachoGenerator)
تاکوژنراتورها، ماشینهایی الکتریکی هستند که با کوپل شدن به شفت موتور، در مد ژنراتوری کار میکنند و حرکت دورانی شفت موتور را به صورت ولتاژ الکتریکی به خروجی منتقل می نمایند. میزان ولتاژ خروجی متناسب با سرعت دوران شفت موتور می باشد. رابطه سرعت چرخش شفت و میزان ولتاژ خروجی بصورت زیر می باشد که در آن ثابت Kg ضریب تقویت حالت دائم نامیده می شود و θ زوایه چرخش روتور می باشد.

تاکوژنراتورها به دو دسته تاکوژنراتورهای AC و DC تقسیم بندی می شوند که تاکوژنراتورهای AC شامل تاکوژنراتورهای القایی و سنکرون و تاکوژنراتورهای DC شامل تاکوژنراتورهای با میدان تحریک و با میدان مغناطیس دائم می باشند. سادگی عملکرد، مقاومت مکانیکی و همچنین اندازه گیری مستقیم سرعت بدون نیاز به محاسبات از مزایای تاکوژنراتور می باشد. در مقابل وجود ریپل در سیگنال خروجی و حساسیت به نویز و تغییرات دمایی از معایب آن به شمار می رود. از این تجهیز در کاربردهای عمومی اندازه گیری سرعت استفاده می شود و کاربردی در ساخت ربات های صنعتی ندارد.

– انکودر (به انگلیسی : Encoder)
انکودرها، دسته دیگری از تجهیزات اندازه گیری سرعت و موقعیت هستند که به دو دسته انکودرهای مطلق (به انگلیسی : Absolute Encoder) و انکودرهای افزایشی (به انگلیسی : Incremental Encoder) تقسیم بندی می شوند. انکدرهای افزایشی، پس از کوپل شدن به شفت موتور، میزان چرخش شفت را بصورت قطاری از پالس به خروجی می فرستند. از آنجا که تعداد پالسها به ازای یک دور کامل شفت مقدار مشخصی است، از طریق شمارش تعداد پالسها میتوان مقدار جابجایی، سرعت و شتاب شفت را محاسبه نمود. انکدرهای افزایشی بر حسب مکانیزم ساخت، خود به دو دسته با حسگر نوری و حسگر مغناطیسی تقسیم بندی می شوند. انکدرهای افزایشی با حسگر نوری دقیق تر و کارایی بالاتری دارند ولی مقاومت انکدرهای افزایشی با حسگر مغناطیسی در برابر شرایط محیطی بالاتر است.


در انکدر مطلق، موقعیت شفت در هر نقطه دارای یک کد منحصر به فرد بصورت کد باینری یا کد گری است. با چرخش شفت در هر لحظه، کد مربوطه بصورت آنی به خروجی ارسال می شود. این انکدر برای کاربردهای موقعیت یابی مناسبتر است چرا که در سیستمهای کنترلی با انکدرهای افزایشی در صورت قطع تغذیه سیستم کنترل، موقعیت شفت از بین خواهد رفت، حال آنکه در انکدرهای مطلق این محدودیت وجود ندارد.

برخی از شرکت های سازنده ربات های صنعتی همچون شرکت هیوندایی رباتیک (HHI)، از انکدرهای مطلق در ساخت ربات خود استفاده می نماید. تجربه نشان داده است که در محیط های صنعتی با آلودگی زیاد، عملکرد انکدرها بصورت ۱۰۰% قابل اطمینان نبوده و احتمال از دست رفتن موقعیت و بروز خطای انکدر به هنگام عملکرد ربات وجود دارد.
– رزولور (به انگلیسی : Resolver)
رزولور نوعی ماشین سنکرون رلوکتانسی (نوعی از سینکروها (به انگلیسی : Synchro)) است که مقدار رلوکتانس آن تابعی از زاویه روتور می باشد. از این ترانسفورماتور الکتریکی دوار، به منظور اندازه گیری زوایه چرخش استفاده می گردد. شکل زیر ساختار رزولور را نشان می دهد:
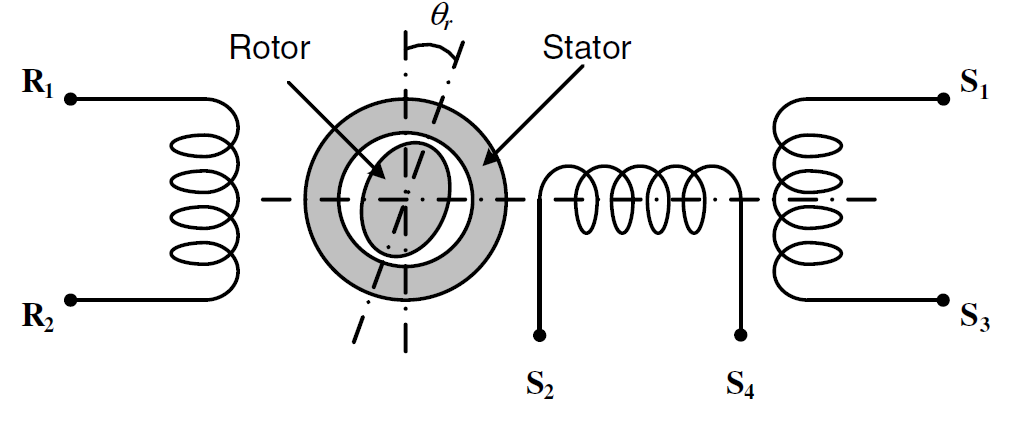
طبق شکل فوق، در ساختار رزولور از سه سیم پیچی استفاده شده است. سیم پیچهای S1-S3 و S2-S4 که به سیم پیچی های کسینوس و سینوس معروف هستند، بصورت یک در میان روی قطب های استاتور رزولور پیچیده شده اند و با یکدیگر ۹۰ درجه اختلاف فاز دارند. سیم پیچ سوم (R1-R2) که به سیم پیچ مرجع معروف است دور تمامی قطب های استاتور پیچیده می شود و در سیم پیچی ثانویه خود که روی روتور رزولور پیچیده شده است، ولتاژ القاء می نماید. حال با اعمال ولتاژ مرجع به سیم پیچ مرجع، در سیم پیچهای استاتور و روتور بسته به زاویه رزولور، ولتاژ با مولفه های مختلف القاء می گردد و به منظور تعیین زاویه سیم پیچ روتور رزولور میتوان مولفه های مختلف ولتاژهای القایی را تحلیل نمود. به عنوان نمونه فرض شود سیم پیچی R1-R2 با ولتاژ متناوب زیر تحریک گردد، در اینصورت در دو سیم پیچ دیگر ولتاژی برابر مقادیر ذیل القاء خواهد گردید:

در روابط فوق، K نسبت سیم پیچی ورودی و خروجی و PP تعداد زوج قطب رزولور است. حال به کمک انجام محاسبات پیچیده، میتوان زوایه سیم پیچی روتور را از روابط فوق استخراج نمود. البته می توان در جهت عکس نیز از این شیوه استفاده نمود، یعنی با اعمال مولفه های ولتاژ به سیم پیچی های استاتور رزولور، مولفه های ولتاژ القایی سیم پیچی روتور رزولور را تحلیل و زاویه شفت را بدست آورد.
رزولورها به علت ساختمان خاص داخلی خود، نسبت به انکدرها برای محیطهای صنعتی و آلوده مناسب تر بوده و قابلیت اطمینان بالاتری دارند، اما نکته منفی این تجهیزات اندازه گیری، دقت و تفکیک پذیری پایین تر آنها نسبت به انکدرها است. اکثر شرکت های بزرگ سازنده ربات های صنعتی همچون شرکت ABB، از رزولورها در سروموتور محورهای منیپولیتور رباتهای صنعتی خود استفاده می نمایند.
