
آشنایی با اجزاء تشکیل دهنده رباتهای صنعتی
ربات، تجهیزی است متشکل از مجموعه ای از محورها (لینکها) که این محورها از طریق مفصلهایی بهم متصل شده اند. هر مفصل معمولاً دارای یک محرک مانند یک موتور الکتریکی یا سیلندر هیدرولیکی است که سبب ایجاد حرکت محورها نسبت به یکدیگر می گردد. این مجموعه از محورها که منیپولیتور نامیده می شوند، توسط یک کنترلر، هدایت و کنترل می گردند. گاهی به اشتباه منیپولیتور نیز ربات خوانده می شود، حال آنکه بازوی مکانیکی(منیپولیتور) با ربات متفاوت است. ربات برخلاف منیپولیتور توسط یک میکروپروسسور یا کامپیوتر کنترل می شود و با فیدبک های که از بخش های مختلف می گیرد معمولاً بصورت خودکار هدایت میشود، حال آنکه منیپولیتور یک بازوی مکانیکی است که عموماً توسط انسان کنترل و هدایت می شود. با این توضیح میتوان گفت یک ربات از دو بخش بازوی مکانیکی یا منیپولیتور (به انگلیسی : Manipulator) و کنترلر تشکیل شده است. از آنجا که اکثر ربات های صنعتی امروزی، ربات های بند بند (به انگلیسی : Articulated) شش محوره با پایه ثابت می باشند، در این مقاله بصورت اجمالی اجزاء تشکیل دهنده این رباتهای صنعتی معرفی و وظایف و کارکرد بخش های مختلف آن ها تشریح می گردد. در این مبحث، از چندین مدل رباتهای شرکت ABB به عنوان نمونه هایی یاد می گردد تا انتقال مطالب بصورت کاربردی و با دید بهتری به خوانندگان محترم منتقل گردد.
همانگونه که بیان شد، یک ربات صنعتی از دو قسمت اصلی بازوی مکانیکی (منیپولیتور) و کنترلر تشکیل شده است. منیپولیتور به عنوان کالبد یک ربات وظیفه انجام فعالیت های تعریف شده را بر عهده دارد. اکثر رباتهای موجود در صنعت، دارای منیپولیتورهایی با شش محور می باشند که این محورها توسط شش عدد سروموتور دارای گیربکس حرکت میکنند. یک نمونه منیپولیتور شرکت ABB، مدل IRB1400 به همراه یک نمونه سروموتور منیپولیتور در شکل زیر نشان داده شده است.
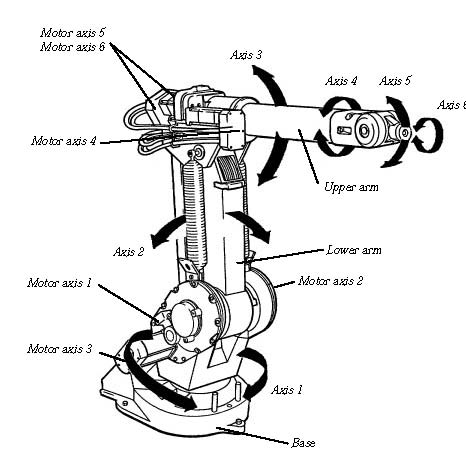

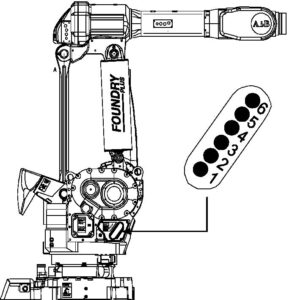
همچنین به منظور ایمنی ربات، تمامی سروموتورهای تعبیه شده برای محورها دارای ترمز بوده و در صورت بروز هرگونه اشکال در سیستم کنترلی ربات، محور مربوطه را قفل می نمایند. با این وجود، روی منیپولیتور، دکمههایی جهت آزادسازی هریک از محورهای ربات بصورت دستی تعبیه شده است تا در مواقع اضطراری از آنها استفاده شود.
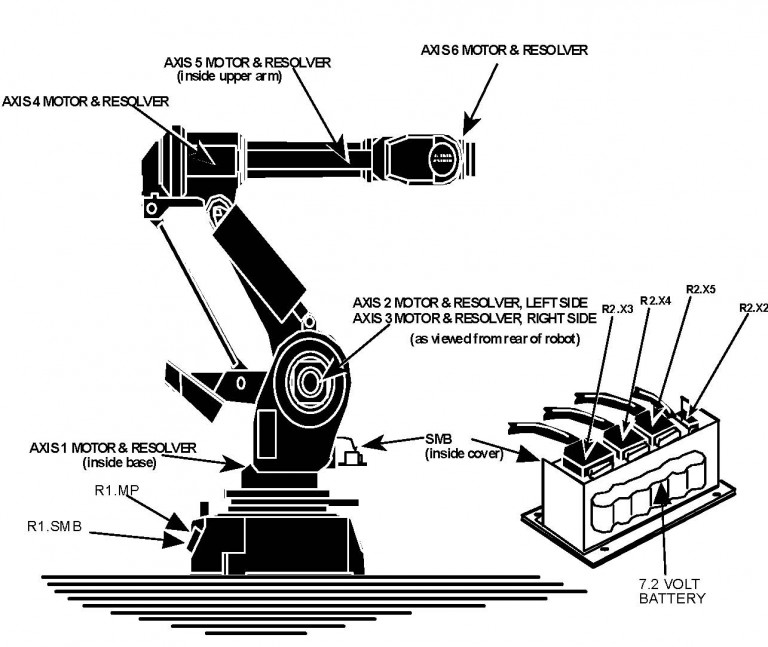
موقعیت دقیق هریک از محورها توسط تجهیزات اندازه گیری موقعیت همچون رزولورها (به انگلیسی : Resolvers) یا انکدرهای مطلق (به انگلیسی : Absolute Encoder) در هر لحظه از زمان سنجیده و به کنترلر ارسال می شود. در منیپولیتورهایی که از رزولورها به منظور اندازه گیری موقعیت محورها استفاده می شود، از بردهای الکترونیکی اندازه گیری سریال (به انگلیسی : (Serial Measurement Board (SMB) روی منیپولیتور به منظور پردازش اطلاعات رزولورها و حفظ اطلاعات موقعیت محورها استفاده می شود. اطلاعات این بردهای الکترونیکی در صورت قطع برق توسط باتریهایی پشتیبانی می شوند. محل قرارگیری SMB در یک نمونه ربات شرکت ABB، مدل IRB6400 در شکل زیر نشان داده شده است.
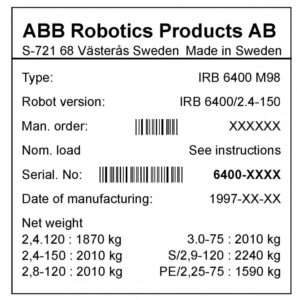
روی Manipulator، پلاکی به منظور مشخص نمودن مدل و اطلاعات عمومی در خصوص ربات تعبیه شده است.
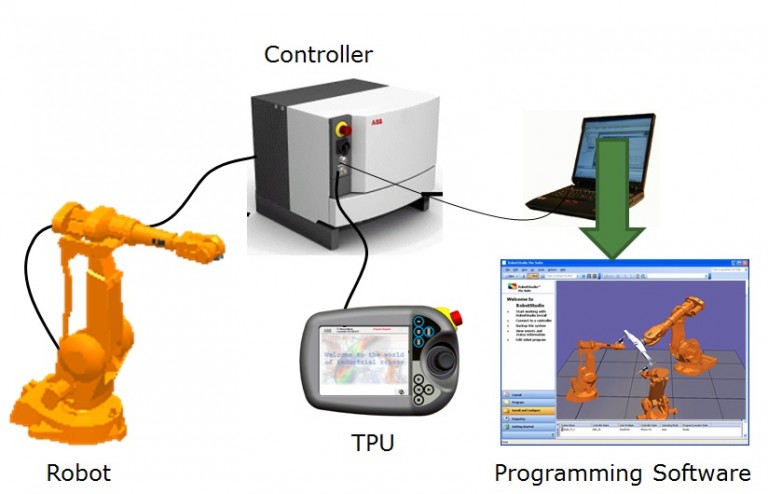
دومین بخش یک ربات صنعتی کنترلر نام دارد و همانگونه که از نام آن مشخص است وظیفه هدایت و کنترل ربات را بر عهده دارد و شامل سیستمهای کنترلی و ایمنی ربات، مدارات درایو و تغذیه محورهای منیپولیتور به همراه مدارات تغذیه و کنترل محورهای خارجی و تجهیزات جانبی ربات می باشد. کنترلر خود دارای متعلقاتی همچون پنل اپراتوری و تیچ پندنت (به انگلیسی : (Teach Pendant Unit (TPU) می باشد که در ادامه به تشریح عملکرد آنها پرداخته می شود.

– کابین کنترلر
کابین کنترلر ربات که در ابعاد متفاوت و بصورت استاندارد یا دوآل طراحی و ارائه می گردد، به منزله مغز ربات، از تمامی فانکشن های لازم جهت حرکت و کنترل ربات برخوردار است. بطور کلی کنترلر از دو بخش اصلی کامپیوتر و سروو تشکیل شده است که در مدلهای استاندارد، هر دو بخش در یک کابین قرار دارند ولی در مدلهای دوآل، این دو بخش در دو کابین مجزا قرار می گیرند. بخش کامپیوتر حداقل از دو پردازشگر یا دو کامپیوتر تشکیل شده است که سیستم عامل مربوط به ربات روی یکی از کامپیوترها نصب و اجرا می گردد و از طریق این سیستم عامل، برنامه حرکت و کنترل ربات پردازش می شود. این کامپیوتر در ربات های ABB، کامپیوتر اصلی (به انگلیسی : Main Computer) نامیده می شود که عملکرد کلی ربات را کنترل می نماید. کامپیوتر(های) بعدی بصورت مستمر وضعیت ورودیها و خروجیها، مدارات ایمنی، فرامین و اطلاعات از سایر تجهیزات، ارتباطات شبکه ای تعریف شده ، اطلاعات ارسالی از SMB و … را پایش و پردازش می نمایند، سرعت حرکت محورهای منیپولیتور را کنترل می نمایند و از طریق کامپیوتر اصلی، در صورت بروز هرگونه مشکل، ربات را متوقف و آلارمها و خطاهای مربوطه را به اطلاع کاربر می رساند. در ربات های ABB، کامپیوتر دوم، ربات کامپیوتر (به انگلیسی : Robot Computer) نامیده می شود. بخش دومِ کنترلر یا بخش سروو شامل مدارات تغذیه سیستم کنترل، مدارات تغذیه و بردهای درایو محورهای ربات و محورهای خارجی می باشد که وظیفه فراهم آوردن بستر حرکتی منیپولیتور را برعهده دارند. ذکر این نکته لازم است که مدارات داخل کنترلر بسته به سازندگان مختلف متفاوت است و در بسیاری از موارد، تفاوت های چشمگیری در طراحی این بخش مشاهده می گردد. به عنوان مثال شرکت هیوندایی از PLC های سری S7-300 زیمنس به جای برد ربات کامپیوتر شرکت ABB در رباتهای خود استفاده می نماید. در شکل زیر، یک کابین کنترلر استاندارد سری IRC5 شرکت ABB نشان داده شده است که دکمه های پنل اپراتوری نیز روی کنترلر تعبیه گردیده است.


تیچ پندنت یا TPU از دیگر اجزاء ربات است که از متعلقات کنترلر به شمار می رود. این کامپیوتر کوچک از طریق یک کابل به کنترلر اصلی متصل می شود و قابلیت های زیادی از جمله امکان بوت نمودن ربات، امکان نمایش خطاها و آلارمهای مربوط به ربات، امکان حرکت ربات بصورت دستی، امکان اجرای برنامه بصورت خط به خط و تغییر برنامه در صورت لزوم را برای کاربر فراهم می نماید. در ضمن بدون وجود این تجهیز، ربات قادر به حرکت نمی باشد. TPU به گونه ای ساخته شده است تا در شرایط سخت محیط های صنعتی ، بخوبی مقاوم باشد. اجزای اصلی TPU، کانکتور اتصال به کنترلر اصلی، صفحه لمسی، دکمه های کار با TPU، دکمه توقف اضطراری، دکمه فعال ساز دستگاه و اهرم گردان می باشد. در شکل زیر یک نمونه تیچ پندنت شرکت ABB از نسل IRC5 نشان داده شده است.

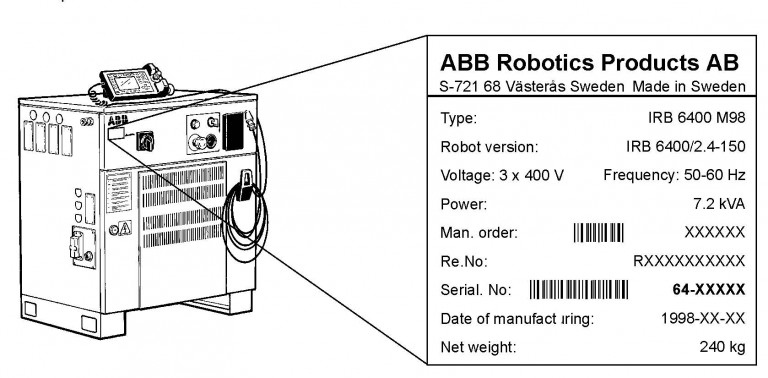
مشابه منیپولیتور روی کنترلر ربات نیز، پلاکی به منظور مشخص نمودن مدل و اطلاعات عمومی در خصوص کنترلر ربات تعبیه شده است. همچنین روی فلش مموری یا دیسک راه انداز ربات، پلاک اطلاعات مربوط به سیستم عامل ربات وجود دارد.
همانگونه که بیان شد با توجه به متفاوت بودن کنترلر و اجزاء رباتهای سازندگان مختلف خصوصاً کنترلر رباتها، به همین میزان آشنایی پیرامون اجزای ربات در اینجا بسنده می کنیم و در بخشهای آتی در خصوص اجزاء، قابلیت ها و ویژگیهای رباتهای شرکت های مختلف بصورت تخصصی صحبت خواهیم کرد.